
Hi,
ich sitze jetzt schon seit mehreren Stunden verwzeifelt daran, Magnetometer und FC in INav7 auszurichten. Ich verstehe einfach die Logik nicht und finde auch kein gescheites Manual.
Also rein optisch ist meine Anordnung so:
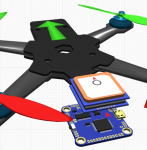
lt. GPS Goku Mini V3 müsste es so eingestellt werden:

Dann sieht es aber so aus:

Wieso ist der default Wert von 0 bei dieser seltsamen Ausrichtung senkrecht zur Flugrichtung?

Abgesehen davon, ist der Pfeil bei meine FC auf der Unterseite und zeigt nach hinten. Wen ich aber das hier so einstelle, dann liegt der Kopter immer auf dem Rücken
ich sitze jetzt schon seit mehreren Stunden verwzeifelt daran, Magnetometer und FC in INav7 auszurichten. Ich verstehe einfach die Logik nicht und finde auch kein gescheites Manual.
Also rein optisch ist meine Anordnung so:
lt. GPS Goku Mini V3 müsste es so eingestellt werden:
Dann sieht es aber so aus:
Wieso ist der default Wert von 0 bei dieser seltsamen Ausrichtung senkrecht zur Flugrichtung?
Abgesehen davon, ist der Pfeil bei meine FC auf der Unterseite und zeigt nach hinten. Wen ich aber das hier so einstelle, dann liegt der Kopter immer auf dem Rücken





