Hallo zusammen,
nachdem mein AQ Hexa nun zusammengebaut, statisch und dynamisch kalibriert wurde und bereits die ersten bereits in der Luft war - hier mal ein kurzer Beitrag dazu.
- CenterPlates 16cm Durchmesser
- Ausleger 30cm Carbon
- Schellen: von Flyduino 16mm Armschellen
- Empfänger: FRSky V8R7SP über Regler BEC
- Regler : F-30A Simonk
- Motoren: Turnigy Multistar 4822-690Kv 22Pole Multi-Rotor Outrunner
- Luftschrauben E-Props 11x5
- Akku (3S 30C 5000mA / später 2x4S 4000mA
Die Motoren machen ohne Propeller einen ohrenbetäubenden Lärm, was scheinbar am Timing liegt, jedoch habe ich festgestellt das dies nur ohne Propeller auftritt. Im Flug ist das Geräusch in Ordnung.
Der Hexa flog bis auf eine Kleinigkeit *hust* auf Anhieb. Was Pitch und Roll angeht, musste nicht viel verändert werden.
Er steht sauber in der Luft, hält die Höhe schon sehr gut aber noch ausbaufähig und die Position besser als jede Naza aber.
Auf Yaw reicht die kleinste Störung(Wind etc.) um den Copter auf dieser Achse weit driften zu lassen. Weder mit den Standard- PID`s noch mit einer Anpassung erreiche ich eine sichtbare Verbesserung. Mal dreht sich der Copter nur um 5-10° mal sind es 1,5 Umdrehungen. Die AQ bemerkt meistens nach etwa 1 Sekunde die Drehung und dreht zurück.
Auch auf den Steuerungseingriff wird verzögert und extrem schwach reagiert.
Ich vermutete zuerst den Empfänger aber das Log ist sauber.
Es kommt mir so vor als wenn die Verzögerung auf dieser Achse extrem ist.
Mit Tilt Angle D lässt sich diese für Nick und Roll anpassen aber welcher ist für YAW zuständig ?
Hatte das schon einmal jemand ?
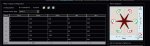
Ich habe mal einen Auszug aus dem letzten Log in den Anhang gepackt ;-)
Viele Grüße
Henry
nachdem mein AQ Hexa nun zusammengebaut, statisch und dynamisch kalibriert wurde und bereits die ersten bereits in der Luft war - hier mal ein kurzer Beitrag dazu.
- CenterPlates 16cm Durchmesser
- Ausleger 30cm Carbon
- Schellen: von Flyduino 16mm Armschellen
- Empfänger: FRSky V8R7SP über Regler BEC
- Regler : F-30A Simonk
- Motoren: Turnigy Multistar 4822-690Kv 22Pole Multi-Rotor Outrunner
- Luftschrauben E-Props 11x5
- Akku (3S 30C 5000mA / später 2x4S 4000mA
Die Motoren machen ohne Propeller einen ohrenbetäubenden Lärm, was scheinbar am Timing liegt, jedoch habe ich festgestellt das dies nur ohne Propeller auftritt. Im Flug ist das Geräusch in Ordnung.
Der Hexa flog bis auf eine Kleinigkeit *hust* auf Anhieb. Was Pitch und Roll angeht, musste nicht viel verändert werden.
Er steht sauber in der Luft, hält die Höhe schon sehr gut aber noch ausbaufähig und die Position besser als jede Naza aber.
Auf Yaw reicht die kleinste Störung(Wind etc.) um den Copter auf dieser Achse weit driften zu lassen. Weder mit den Standard- PID`s noch mit einer Anpassung erreiche ich eine sichtbare Verbesserung. Mal dreht sich der Copter nur um 5-10° mal sind es 1,5 Umdrehungen. Die AQ bemerkt meistens nach etwa 1 Sekunde die Drehung und dreht zurück.
Auch auf den Steuerungseingriff wird verzögert und extrem schwach reagiert.
Ich vermutete zuerst den Empfänger aber das Log ist sauber.
Es kommt mir so vor als wenn die Verzögerung auf dieser Achse extrem ist.
Mit Tilt Angle D lässt sich diese für Nick und Roll anpassen aber welcher ist für YAW zuständig ?
Hatte das schon einmal jemand ?
Ich habe mal einen Auszug aus dem letzten Log in den Anhang gepackt ;-)
Viele Grüße
Henry
Anhänge
-
 920,9 KB Aufrufe: 41
920,9 KB Aufrufe: 41 -
1,3 MB Aufrufe: 13