Vorweg: ich bin kein Meister der Regler

AFAIK sollte man sich ansehen, was die einzelnen Regler (roll, pitch, ...) so machen.
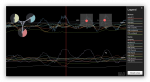
Bei dir scheint roll zu oszillieren, unten die Sinuskurve.
Zum Vergleich findest du hier ein paar Bilder:
http://en.wikipedia.org/wiki/PID_controller
Ich würde erstmal roll P ein gutes Stück runternehmen, dann schauen ob er im Rate Modus die Lage hält und evtl. I korrigieren bis er das tut.
D sollte schnelle Änderungen verhindern, also evtl. damit dann auch mal probieren.
Ausserdem kann man die Anzeigen gruppieren, also Gyro+PID für roll, pitch, yaw pro Block.
Sieht man besser wie er auf Eingaben, Fehler etc. reagiert.
Viel Glück!