Hallo Leute,
Ich möchte euch hier mein jüngstes Projekt vorstellen.
Ziel:
Mein Ziel war es einen FPV tauglichen Quadrocopter mit genügend Leistungsreserven für Änderungen und Zuladungen mit einem Abfluggewicht von etwa 2-2,5kg.
Durch Zufall bin ich dann im Netz auf den AD1 von Action Drone USA gestoßen, welcher mir sehr gut gefällt. Aber $520.00 für einen Rahmen kann und will ich als Student nicht ausgeben. Daher stand fest es wird ein Eigenbau angelehnt an den AD1.
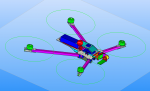
Nach einigen Stunden am PC (3D Zeichnen ist nicht meine Stärke) stand dann auch ein erstes 3D Modell mit eingezeichneten Komponenten und Schwerpunktberechnung fest.
Als Komponenten werden verwendet:
Fernsteuerung: Graupner MC-32
Empfänger: Graupner GR-12
FC: MW32 von Flyduino
Motor: Emax 3510
Propeller: 13x5,5 Carbon
Akku: Turnigy 5000mA 4S 30-40C
GPS: NEO-6M ublox
OSD: Minimosd mit KV Team drauf
AV Transmitter: Boscam TS350 (10mW) mit Frequenzbereich Umbau
ESC: Q Brain 4x25A mit blheli Firmware
Gimbal: umgebautes billig China Gimbal mit nachgebauter Alex Mos und 2208 Motoren
Kamera: GoPro Hero 3 white
Bautag 1
Gestern konnte ich dann endlich starten mit Fräsen und erstem Zusammenbau.
Verwendet wurde:
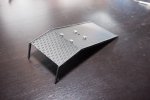
Deckel und Seitenwände der FC Verkleidung 1,0mm Carbon
Untere Platte: 1,8mm Carbon
Rest: 2,1mm Carbon
Erstmal alles gefräst. Ein ganz schöner Haufen an Arbeit bei den ganzen Teilen.


Dann wurde mal alles probehalber zusammen gesteckt.

und anschließend dann alles was zu kleben war mit 5Minuten Epoxi geklebt.




Und anschließend wurden dann auch gleich noch die ersten beiden Ausleger angefertigt und testweise verschraubt.


mehr war dann an Bautag1 leider auch nicht drinnen.
2. Bautag
Am 2. Bautag wurden dann die Restlichen Ausleger angefertigt. Ausserdem kamen die Motore an. 3 davon wurden auch bereits montiert der 4 wartet auf dem Zugprüfstand bis die Props zum Zugtest kommen.
3. Bautag
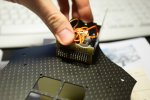
Am 3. Bautag wurde begonnen mit der Verdrahtung und Montage der elektronischen Komponenten.
Das MW32 zieht an seinem Bestimmungsort ein. Natürlich wurde auch noch ein wenig Schaumstoff mit hineingepackt um dem Baro möglichst gute Arbeitsbedingungen zu ermöglichen.


Die USB Schnittstelle des MW32 ist vom Heck aus zugänglich und wird durch einen einfachen Streifen "Tesa" verschlossen.

MinimOSD und 10mW Sender so wie die Gimbalsteuerung wurden an Ihre Bestimmungsorte montiert und verdrahtet.

Und so sieht das ganze aktuell aus.


Ich bin gespannt auf eure Meinungen und freue mich über euer Feedback.
Steph
Ich möchte euch hier mein jüngstes Projekt vorstellen.
Ziel:
Mein Ziel war es einen FPV tauglichen Quadrocopter mit genügend Leistungsreserven für Änderungen und Zuladungen mit einem Abfluggewicht von etwa 2-2,5kg.
Durch Zufall bin ich dann im Netz auf den AD1 von Action Drone USA gestoßen, welcher mir sehr gut gefällt. Aber $520.00 für einen Rahmen kann und will ich als Student nicht ausgeben. Daher stand fest es wird ein Eigenbau angelehnt an den AD1.
Nach einigen Stunden am PC (3D Zeichnen ist nicht meine Stärke) stand dann auch ein erstes 3D Modell mit eingezeichneten Komponenten und Schwerpunktberechnung fest.
Als Komponenten werden verwendet:
Fernsteuerung: Graupner MC-32
Empfänger: Graupner GR-12
FC: MW32 von Flyduino
Motor: Emax 3510
Propeller: 13x5,5 Carbon
Akku: Turnigy 5000mA 4S 30-40C
GPS: NEO-6M ublox
OSD: Minimosd mit KV Team drauf
AV Transmitter: Boscam TS350 (10mW) mit Frequenzbereich Umbau
ESC: Q Brain 4x25A mit blheli Firmware
Gimbal: umgebautes billig China Gimbal mit nachgebauter Alex Mos und 2208 Motoren
Kamera: GoPro Hero 3 white
Bautag 1
Gestern konnte ich dann endlich starten mit Fräsen und erstem Zusammenbau.
Verwendet wurde:
Deckel und Seitenwände der FC Verkleidung 1,0mm Carbon
Untere Platte: 1,8mm Carbon
Rest: 2,1mm Carbon
Erstmal alles gefräst. Ein ganz schöner Haufen an Arbeit bei den ganzen Teilen.
Dann wurde mal alles probehalber zusammen gesteckt.
und anschließend dann alles was zu kleben war mit 5Minuten Epoxi geklebt.
Und anschließend wurden dann auch gleich noch die ersten beiden Ausleger angefertigt und testweise verschraubt.
mehr war dann an Bautag1 leider auch nicht drinnen.
2. Bautag
Am 2. Bautag wurden dann die Restlichen Ausleger angefertigt. Ausserdem kamen die Motore an. 3 davon wurden auch bereits montiert der 4 wartet auf dem Zugprüfstand bis die Props zum Zugtest kommen.
3. Bautag
Am 3. Bautag wurde begonnen mit der Verdrahtung und Montage der elektronischen Komponenten.
Das MW32 zieht an seinem Bestimmungsort ein. Natürlich wurde auch noch ein wenig Schaumstoff mit hineingepackt um dem Baro möglichst gute Arbeitsbedingungen zu ermöglichen.
Die USB Schnittstelle des MW32 ist vom Heck aus zugänglich und wird durch einen einfachen Streifen "Tesa" verschlossen.
MinimOSD und 10mW Sender so wie die Gimbalsteuerung wurden an Ihre Bestimmungsorte montiert und verdrahtet.
Und so sieht das ganze aktuell aus.
Ich bin gespannt auf eure Meinungen und freue mich über euer Feedback.
Steph
Zuletzt bearbeitet: