
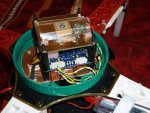
Seit einer Zeit experimentiere ich mit MegapiratNG (http://code.google.com/p/megapirateng/) auf dem CRIUS All In One Pro Board (http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=765) herum.
Einige Dinge wie z.B. die Lipo-Überwachung, den Piezo-Summer habe ich schon zum laufen gebracht.
Erste Versuche HOTT-Telemetrie zum laufen zu bringen (http://code.google.com/p/hott-for-ardupilot/) hab ich auch schon unternommen, jedoch ergaben sich einige Schwierigkeiten, dazu aber später evtl. mehr.
Mein Setup:
- Original DJI-F450 Rahmen mit den original Reglern und Motoren
- 3S Akku 2200 mA/h
- Graupner 11-5" Props
- MTK3329 PA6B GPS auf eigenem Eagle Layout
Da ich mich vorher nur mit Multiwii beschäftigt habe komme ich mit der PID Einstellung nicht richtig klar. Ich habe viel herumprobiert und einigermaßen fliegbare Werte.
Im Acro-Mode verhält sich der Copter nicht so wie ich es von Multiwii gewohnt bin sondern irgenwie so als würde der Copter an einem Faden hängen und beim Geben einer ROLL bzw. PITCH Knüppelbewegung pendelt der Copter um die entsprechende Achse. D.h. Rumtoben (z.B. Knüppel nach vorne und Gas rein) ist nicht möglich, da der Copter dies gleich wieder auszuregeln versucht...
Hat jemand ähnlich Erfahrungen gemacht oder weiss wo an den PID Einstellungen ich noch schrauben muss??
Einige Dinge wie z.B. die Lipo-Überwachung, den Piezo-Summer habe ich schon zum laufen gebracht.
Erste Versuche HOTT-Telemetrie zum laufen zu bringen (http://code.google.com/p/hott-for-ardupilot/) hab ich auch schon unternommen, jedoch ergaben sich einige Schwierigkeiten, dazu aber später evtl. mehr.
Mein Setup:
- Original DJI-F450 Rahmen mit den original Reglern und Motoren
- 3S Akku 2200 mA/h
- Graupner 11-5" Props
- MTK3329 PA6B GPS auf eigenem Eagle Layout
Da ich mich vorher nur mit Multiwii beschäftigt habe komme ich mit der PID Einstellung nicht richtig klar. Ich habe viel herumprobiert und einigermaßen fliegbare Werte.
Im Acro-Mode verhält sich der Copter nicht so wie ich es von Multiwii gewohnt bin sondern irgenwie so als würde der Copter an einem Faden hängen und beim Geben einer ROLL bzw. PITCH Knüppelbewegung pendelt der Copter um die entsprechende Achse. D.h. Rumtoben (z.B. Knüppel nach vorne und Gas rein) ist nicht möglich, da der Copter dies gleich wieder auszuregeln versucht...
Hat jemand ähnlich Erfahrungen gemacht oder weiss wo an den PID Einstellungen ich noch schrauben muss??
Anhänge
-
 139,6 KB Aufrufe: 49
139,6 KB Aufrufe: 49 -
 47,9 KB Aufrufe: 55
47,9 KB Aufrufe: 55 -
 50,5 KB Aufrufe: 46
50,5 KB Aufrufe: 46


