Jungfernflug!
So, es ist vollbracht.
Nach langem hin und her habe ich mich doch für den APM Flightstack entschieden, da ich den gut kenne und ich beim PX4 außer für die Standardsetups kaum Dokumentation gefunden habe.
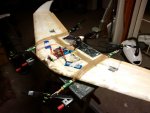
Mein alter Nuri, den ich nie so richtig lieb gewonnen habe musste herhalten und wurde umgebaut (siehe Bild).
Als Motoren habe ich diese verbaut
http://www.hobbyking.com/hobbyking/...peller_Combo_10x4_5_CW_CCW_EU_Warehouse_.html
nachdem ich mit ein paar alten aus meinem ersten Tricopter nicht wirklich glücklich geworden bin.
FC ist ein Pixfalcon.
Die ESC's sind Multistar 30A mit BL Heli.
Auf den Geschwindigkeitssensor auch China warte ich leider noch.
Die P Parameter für den Quadrocopterflug musste ich deutlich hoch drehen. Toll fliegt er im Q Stable Modus bei Wind nicht, da der große Flügel doch reichlich windanfällig ist. Vielleicht kann ich da noch mit den PID's etwas erreichen. Autotune ist ja leider nicht....
Der Übergang aus Q-Stable Modus in FWBA klappte problemlos - da war dann leider der P Pitch Wert zu hoch und er hat geschwungen, war aber fliegbar.
Dann mein Gedankenfehler: Gas weg und mal sehen wie er gleitet - keine gute Idee bei dem Nuri in FWBA - er fing sofort an zu Stallen und über die Tragfläche wegzukippen. Ließ sich aber problemlos im Q Modus abfangen.
Beim zweiten Versuch (den gleichen Fehler zu machen...) hab ich mich dann in den ungewohnten Modi verschaltet und war recht schnell im Acker....
Schäden halten sich Gott sei Dank sehr in Grenzen.
Nun ein bisschen an den Parametern gedreht (zusätzlich Pitch bei low Trottle in FWBA und P in FWBA reduziert) - mal sehen wie es morgen läuft.
Grüße
Peter