Hallo FPV-Community,
Habe hier schon vieles gelernt und gelesen, danke für dieses wunderbare Forum")
Doch nun brauche ich leider doch einmal Hilfe, ich komme einfach nicht weiter.
Habe einen neuen Copter gebaut. ZMR250, Naze32 rev 6, DYS 30A ESC's, DYS 2205-2750KV, Cleanflight 1.13, D4R-II.
Ich weiß, es gibt bereits einen ähnlichen Post hier, aber da kam irgendwie nichts raus damit.
Das Problem: Nach dem Abheben alles stabil, nach kurzer Zeit beginnt der Copter nach vorne rechts zu fliegen. ich muss immer wieder gegensteuern um ihn am fleck zu halten. Das wird immer stärker und es wird richtig stark. also kein Standarddrift.
Habe schon versucht: Naze32 neu flashen, konfiguration resetten und komplett neu gemacht ohne Restore. PIDs herumgespielt, keine Besserung. Mit den default PID's ist er eigentlich schon ziemlich optimal im LOS Flug. Gyro habe ich schon kalibriert, ist gerade.
Was mir aufgefallen ist: Im Acro Mode ist er perfekt stabil, sobald ich wieder in ANGLE gehe neigt er sich sofort wieder nach vorne-rechts. Habe auch ein Blackbox Log mit 100% Aufzeichnungsdichte gemacht, meiner Meinung nach alles OK und keine Vibrationen. Motoren haben alle kein Spiel/unruiger Lauf.
Was mir aufgefallen ist und ich nicht genau weis was es ist: Zwischenzeitlich zischt/spuckt es hörbar. Sehen tut man nix. Passiert auch random in keinem speziellen Zusammenhang. Keine Ahnung ob das was damit zu tun hat.
EDIT: BLHelis Motorbremse hat sich als Problem diesbzeüglich rausgestellt!
FPV wollte ich eigentlich erst fliegen wenn der Hover im Angle Modus passt.
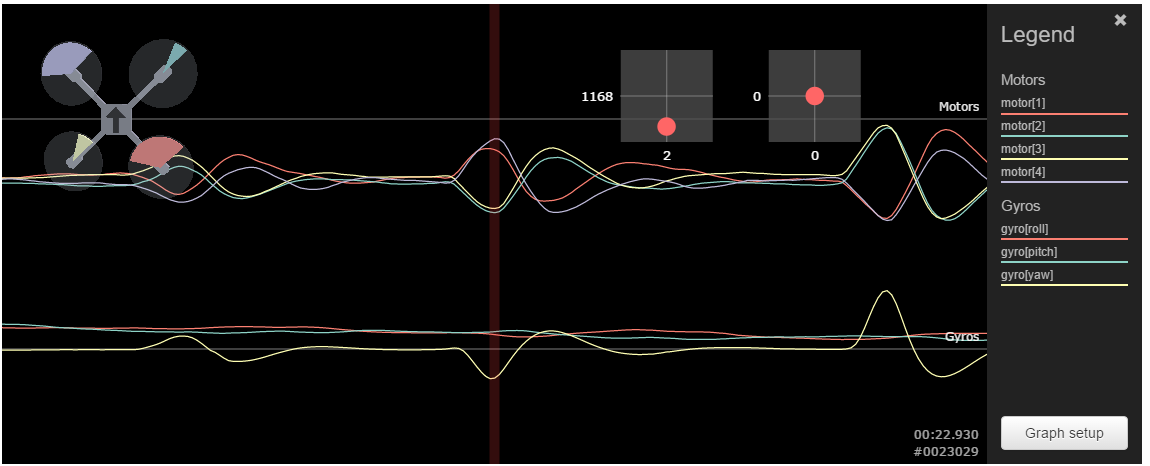
Anbei das Log, es ist ein kurzer Hover Flug wo ich kurz versuche am Stand zu schweben und immer nach rechts-hinten gegensteuern muss.
Vielleicht sieht einer von den Profis sofort was da im Busch ist
Hier das Blackbox-Log: https://seafile.mrpurple.xyz/f/e30faf141a/?raw=1
Habe hier schon vieles gelernt und gelesen, danke für dieses wunderbare Forum
Doch nun brauche ich leider doch einmal Hilfe, ich komme einfach nicht weiter.
Habe einen neuen Copter gebaut. ZMR250, Naze32 rev 6, DYS 30A ESC's, DYS 2205-2750KV, Cleanflight 1.13, D4R-II.
Ich weiß, es gibt bereits einen ähnlichen Post hier, aber da kam irgendwie nichts raus damit.
Das Problem: Nach dem Abheben alles stabil, nach kurzer Zeit beginnt der Copter nach vorne rechts zu fliegen. ich muss immer wieder gegensteuern um ihn am fleck zu halten. Das wird immer stärker und es wird richtig stark. also kein Standarddrift.
Habe schon versucht: Naze32 neu flashen, konfiguration resetten und komplett neu gemacht ohne Restore. PIDs herumgespielt, keine Besserung. Mit den default PID's ist er eigentlich schon ziemlich optimal im LOS Flug. Gyro habe ich schon kalibriert, ist gerade.
Was mir aufgefallen ist: Im Acro Mode ist er perfekt stabil, sobald ich wieder in ANGLE gehe neigt er sich sofort wieder nach vorne-rechts. Habe auch ein Blackbox Log mit 100% Aufzeichnungsdichte gemacht, meiner Meinung nach alles OK und keine Vibrationen. Motoren haben alle kein Spiel/unruiger Lauf.
Was mir aufgefallen ist und ich nicht genau weis was es ist: Zwischenzeitlich zischt/spuckt es hörbar. Sehen tut man nix. Passiert auch random in keinem speziellen Zusammenhang. Keine Ahnung ob das was damit zu tun hat.
EDIT: BLHelis Motorbremse hat sich als Problem diesbzeüglich rausgestellt!
FPV wollte ich eigentlich erst fliegen wenn der Hover im Angle Modus passt.
Anbei das Log, es ist ein kurzer Hover Flug wo ich kurz versuche am Stand zu schweben und immer nach rechts-hinten gegensteuern muss.
Vielleicht sieht einer von den Profis sofort was da im Busch ist
Hier das Blackbox-Log: https://seafile.mrpurple.xyz/f/e30faf141a/?raw=1
Zuletzt bearbeitet: