
Die Idee eines FPV-VTOLs schwebt mir schon lange im Kopf. Ich will ein Fluggerät, das die Vorteile eines Copters und eines Fliegers vereint: die Möglichkeit, in beliebigen Locations zu starten und zu landen sowie auf der Stelle zu schweben kombiniert mit guter Vorwärtsgeschwindigkeit und Reichweite eines Flugzeugs.
Konzept
Nun habe ich mir lange überlegt, welche genaue Ausprägung eines VTOL ich bauen will. Gibt ja viel Auswahl: diverse Flieger kombiniert mit Quad-, Tri- und Bi-Coptern, mit schwenkbaren Motoren oder getrennten Vorwärtsflug- und Schwebeantrieben, Tailsitter und noch mehr seltsame Kreationen. Im Endeffekt habe ich mich durch existierende Projekte inspirieren lassen, und beschloss mich auf die Bauform eines Nurflüglers kombiniert mit einem Tricopter. Soll schematisch dann ungefähr so aussehen:
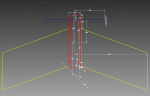
Als Wing habe ich mir bereits einen MB Joost EagleEye Mini besorgt - komplett zusammengebaut, foliert und mit Servos versehen von Micha") Danke nochmal an der Stelle, der Flieger ist genau wonach ich gesucht habe: die 120cm Größe finde ich absolut angemessen, noch gut transportabel (vor allem mit steckbaren Flügeln) aber schon groß genug, um die gesamte nötige Technik ohne Probleme zu tragen - vor allem mit dem großräumigen Rumpf. Am Rumpf lässt sich auch wunderbar ein Querträger für die vorderen zwei Motoren anbringen, wie im Schema zu sehen.
Danke nochmal an der Stelle, der Flieger ist genau wonach ich gesucht habe: die 120cm Größe finde ich absolut angemessen, noch gut transportabel (vor allem mit steckbaren Flügeln) aber schon groß genug, um die gesamte nötige Technik ohne Probleme zu tragen - vor allem mit dem großräumigen Rumpf. Am Rumpf lässt sich auch wunderbar ein Querträger für die vorderen zwei Motoren anbringen, wie im Schema zu sehen.
Wie das Ganze zu funktionieren hat. Alle drei Motoren schwenken auf der Querachse, die vorderen Motoren von "nach vorne" bis "nach oben", der hintere Motor (ein Pusher) von "nach hinten" bis "nach unten". Im Gegensatz zu normalen Tris schwenkt der hintere Motor nicht seitlich; die Giersteuerung wird durch Differenzialschwenken der vorderen Motoren realisiert - dafür können sie nicht nur senkrecht nach oben, sondern auch minimal nach hinten überschwenken. Jeder Motor hat einen Schwenkservo. Zusätzlich sind die normalen Ruder in den Flächen des EagleEye mit je einem Servo vorhanden.
Da der hintere Motor im Coptermodus nach unten schwenkt, muss natürlich auch irgendeine Art Landegestell dran. Ein Heli-Lander würde an einem Nuri herrlich bekloppt aussehen - genau deshalb nehme ich wohl auch einen, zumindest für den Anfang
Elektronik
Gesteuert wird das alles erstmal von einem KK2.1.5 Board mit der OpenAeroVTOL Firmware. Das Board hat genau 8 Ausgänge für Motoren und Servos, was wunderbar aufgeht. Und mit der Firmware lässt sich die Tri+Wing Kombination ohne Probleme programmieren - einen genau solchen Aufbau hat bereits mindestens eine Person im RCGroups OpenAeroVTOL Thread erfolgreich aufgebaut und mehrfach geflogen (und gecrasht, das hatte aber nichts mit der Technik zu tun ).
Welche genau Motoren und Servos zum Einsatz kommen, habe ich noch nicht entschieden. Vielleicht kann mir die Community ja an der Stelle etwas helfen...
Ich denke die Propellergröße von 12" sollte gut passen. Habe da die 12x6 HQ E-Prop Nachbauten von Flyduino als eine gute und günstige Option im Blick - E-Props sind ja beides bei Fliegern und Coptern oft im Einsatz, mit der 6" Steigung sollten die Propeller auch für relativ zügigen Vorwärtsflug gut geeignet sein. Das Ganze wird auf jeden Fall mit 4S betrieben, möchte gerne meine 4S 5000er Lipos von den Coptern mitverwenden. Das geschätzte Gesamtgewicht des VTOLs wird zwischen 2-2,5kg liegen.
Motoren: Ich bräuchte also für sicheres Schweben Motoren mit 700-800kv, mit den mit den 12x6 E-Props bei 4S knapp 1,5-2kg Schub erreicht wird. Wer da was gutes und nicht zu teures kennt (T-Motor wird mir an der Stelle etwas teuer), bitte melden.
Servos: Da kenne ich mich ehrlich gesagt Null aus. Es sollten ordentlich kräftige sein, da die Belastung auf die Schwenkmodule während der Transition insbesondere bei höheren Geschwindigkeiten doch beträchtig ist. Und sie sollten mehr als 90° Verfahrweg haben, idealerweise 100-105° - das sollten meines Wissens nach die meisten Heli-Heckservos haben? Da wäre ich für weiterführende Informationen auch sehr dankbar.
Mechanik
Und noch mehr Einsatz von der Community ist gefragt. Ich bin noch am Überlegen, wie ich die Schwenkmechanik genau löse. Beim Heckmotor ist das Ganze relativ straightforward (U-förmige Befestigung mit Motorhalter mit zwei Schrauben als Schwenkachse eingespannt, Servo und Anlenkung seitlich dran, das Ganze vermutlich aus gefrästen GFK Teilen zusammengesetzt).
Interessanter wird's bei den vorderen Motoren. Ich möchte die auf einem Querträger montieren, der im Rumpf vor der Tragfläche befestigt wird - und der Querträger wäre im Idealfall ein 16mm CFK Rohr. Das Rohr ist dann auch die Achse, um die die Motoren schwenken sollen. Nun fallen mir mögliche Lösungen ein, aber keine davon gefällt mir richtig gut:
- Motormounts mit Kugellagern an den Rohrenden anbringen. Nachteil: große schwere Kugellager (16mm Innendurchmesser, wenn sie aufs Rohr passen sollen).
- "Rohr-im-Rohr" Lösung a-la r0sewhites Tricopter. Nachteil: Querträger muss in der Mitte aufgeteilt werden, extra Gewicht durch die inneren Rohre.
Vielleicht fallen euch ja bessere Lösungen ein - bitte alles posten. Das CFK Rohr ist auch kein Muss, es kann auch 15mm Aluvierkant werden, wenn sich so eine bessere Lösung ergibt.
Projektphasen
Im Moment bin ich noch in der Konzept- und Planungsphase des Ganzen. Habe aber schon weiterführende Ideen für wenn es soweit ist. Hier also die grobe Übersicht von was ich alles damit vorhabe. Jeder Schritt baut auf dem vorherigen auf:
Also, her mit euren Kommentaren, Vorschlägen, Ideen und sonstigen Beiträgen
Konzept
Nun habe ich mir lange überlegt, welche genaue Ausprägung eines VTOL ich bauen will. Gibt ja viel Auswahl: diverse Flieger kombiniert mit Quad-, Tri- und Bi-Coptern, mit schwenkbaren Motoren oder getrennten Vorwärtsflug- und Schwebeantrieben, Tailsitter und noch mehr seltsame Kreationen. Im Endeffekt habe ich mich durch existierende Projekte inspirieren lassen, und beschloss mich auf die Bauform eines Nurflüglers kombiniert mit einem Tricopter. Soll schematisch dann ungefähr so aussehen:
Als Wing habe ich mir bereits einen MB Joost EagleEye Mini besorgt - komplett zusammengebaut, foliert und mit Servos versehen von Micha
Danke nochmal an der Stelle, der Flieger ist genau wonach ich gesucht habe: die 120cm Größe finde ich absolut angemessen, noch gut transportabel (vor allem mit steckbaren Flügeln) aber schon groß genug, um die gesamte nötige Technik ohne Probleme zu tragen - vor allem mit dem großräumigen Rumpf. Am Rumpf lässt sich auch wunderbar ein Querträger für die vorderen zwei Motoren anbringen, wie im Schema zu sehen.Wie das Ganze zu funktionieren hat. Alle drei Motoren schwenken auf der Querachse, die vorderen Motoren von "nach vorne" bis "nach oben", der hintere Motor (ein Pusher) von "nach hinten" bis "nach unten". Im Gegensatz zu normalen Tris schwenkt der hintere Motor nicht seitlich; die Giersteuerung wird durch Differenzialschwenken der vorderen Motoren realisiert - dafür können sie nicht nur senkrecht nach oben, sondern auch minimal nach hinten überschwenken. Jeder Motor hat einen Schwenkservo. Zusätzlich sind die normalen Ruder in den Flächen des EagleEye mit je einem Servo vorhanden.
Da der hintere Motor im Coptermodus nach unten schwenkt, muss natürlich auch irgendeine Art Landegestell dran. Ein Heli-Lander würde an einem Nuri herrlich bekloppt aussehen - genau deshalb nehme ich wohl auch einen, zumindest für den Anfang
Elektronik
Gesteuert wird das alles erstmal von einem KK2.1.5 Board mit der OpenAeroVTOL Firmware. Das Board hat genau 8 Ausgänge für Motoren und Servos, was wunderbar aufgeht. Und mit der Firmware lässt sich die Tri+Wing Kombination ohne Probleme programmieren - einen genau solchen Aufbau hat bereits mindestens eine Person im RCGroups OpenAeroVTOL Thread erfolgreich aufgebaut und mehrfach geflogen (und gecrasht, das hatte aber nichts mit der Technik zu tun
).Welche genau Motoren und Servos zum Einsatz kommen, habe ich noch nicht entschieden. Vielleicht kann mir die Community ja an der Stelle etwas helfen...
Ich denke die Propellergröße von 12" sollte gut passen. Habe da die 12x6 HQ E-Prop Nachbauten von Flyduino als eine gute und günstige Option im Blick - E-Props sind ja beides bei Fliegern und Coptern oft im Einsatz, mit der 6" Steigung sollten die Propeller auch für relativ zügigen Vorwärtsflug gut geeignet sein. Das Ganze wird auf jeden Fall mit 4S betrieben, möchte gerne meine 4S 5000er Lipos von den Coptern mitverwenden. Das geschätzte Gesamtgewicht des VTOLs wird zwischen 2-2,5kg liegen.
Motoren: Ich bräuchte also für sicheres Schweben Motoren mit 700-800kv, mit den mit den 12x6 E-Props bei 4S knapp 1,5-2kg Schub erreicht wird. Wer da was gutes und nicht zu teures kennt (T-Motor wird mir an der Stelle etwas teuer), bitte melden.
Servos: Da kenne ich mich ehrlich gesagt Null aus. Es sollten ordentlich kräftige sein, da die Belastung auf die Schwenkmodule während der Transition insbesondere bei höheren Geschwindigkeiten doch beträchtig ist. Und sie sollten mehr als 90° Verfahrweg haben, idealerweise 100-105° - das sollten meines Wissens nach die meisten Heli-Heckservos haben? Da wäre ich für weiterführende Informationen auch sehr dankbar.
Mechanik
Und noch mehr Einsatz von der Community ist gefragt. Ich bin noch am Überlegen, wie ich die Schwenkmechanik genau löse. Beim Heckmotor ist das Ganze relativ straightforward (U-förmige Befestigung mit Motorhalter mit zwei Schrauben als Schwenkachse eingespannt, Servo und Anlenkung seitlich dran, das Ganze vermutlich aus gefrästen GFK Teilen zusammengesetzt).
Interessanter wird's bei den vorderen Motoren. Ich möchte die auf einem Querträger montieren, der im Rumpf vor der Tragfläche befestigt wird - und der Querträger wäre im Idealfall ein 16mm CFK Rohr. Das Rohr ist dann auch die Achse, um die die Motoren schwenken sollen. Nun fallen mir mögliche Lösungen ein, aber keine davon gefällt mir richtig gut:
- Motormounts mit Kugellagern an den Rohrenden anbringen. Nachteil: große schwere Kugellager (16mm Innendurchmesser, wenn sie aufs Rohr passen sollen).
- "Rohr-im-Rohr" Lösung a-la r0sewhites Tricopter. Nachteil: Querträger muss in der Mitte aufgeteilt werden, extra Gewicht durch die inneren Rohre.
Vielleicht fallen euch ja bessere Lösungen ein - bitte alles posten. Das CFK Rohr ist auch kein Muss, es kann auch 15mm Aluvierkant werden, wenn sich so eine bessere Lösung ergibt.
Projektphasen
Im Moment bin ich noch in der Konzept- und Planungsphase des Ganzen. Habe aber schon weiterführende Ideen für wenn es soweit ist. Hier also die grobe Übersicht von was ich alles damit vorhabe. Jeder Schritt baut auf dem vorherigen auf:
- Basisaufbau und Flugtests, mit der Technik wie oben beschrieben, bis das Gerät im Schweben und Vorwärtsflug zuverlässig tut.
- FPV Aufbau - weil ich nahezu exklusiv FPV fliege und auch den VTOL extra dafür baue. Vorne in die vorgesehene Halterung im EE Mini kommt eine GoPro rein, oben drauf ein Pan/Tilt mit einer FPV Kamera, den ich dann mit dem Headtracker bediene.
- FC-Erweiterung mit einer APM/ArduPlane: Konzept wie hier beschrieben. Gleich mit GPS, einem MinimOSD, 433 MHz Telemetrie - wenn dann richtig.
- (nur Idee, kein Plan ob überhaupt machbar) GoPro-Gimbal: entweder ein 2-Achser vorne dran, oder lieber ein 3-Achser, den man im (semi-)autonomen Flug frei drehen kann, oder per ROI Funktion des APM auf einen Punkt gerichtet halten kann im Vorbei- oder Kreisfliegen.
Also, her mit euren Kommentaren, Vorschlägen, Ideen und sonstigen Beiträgen
Zuletzt bearbeitet:

