
Flächenflieger auto takeoff und land?
- Themenstarter avidav
- Beginndatum
Hallo,
gehen tut das schon, siehe z.B.
http://www.feiyu-tech.com/product-en.php?id=26&mlist=3
luftpirat
gehen tut das schon, siehe z.B.
http://www.feiyu-tech.com/product-en.php?id=26&mlist=3
luftpirat
Für mich stellt sich halt die Frage was der Sinn in einer automatischen Landung bzw. eines automatischen Startens wäre?
Dann muss man ja gar nichts mehr selbst machen... Flugzeug startet selber, fliegt selber und Landet selbst. Wo ist da der Spaß, bzw. was muss man da noch selbst können?
Außerdem kommt ein solches System einer völlig autonomen Drohne ziemlich nahe finde ich.... (meine Meinung dazu)
Gruss Andre
Dann muss man ja gar nichts mehr selbst machen... Flugzeug startet selber, fliegt selber und Landet selbst. Wo ist da der Spaß, bzw. was muss man da noch selbst können?
Außerdem kommt ein solches System einer völlig autonomen Drohne ziemlich nahe finde ich.... (meine Meinung dazu)
Gruss Andre
ja den Flieger als UAV zu nutzen gibt der APM her. Das war jetzt aber nicht was mein vereinskollege will. Die frage die wir uns stellen war halt ob es geht ober nicht mit dem automatischen starten und landen. Autolanding als Failsavefunktion wäre doch schon mal garnicht so sinnfrei finde ich. Autostart wäre in unserem fall eher ein nettes gimmick. Wir wollen halt ein wenig mit dem APM spielen, ob das eine oder andere nun sinn macht sei jetzt mal dahingestellt. Rc Fliegen macht ja auch nicht wirklich sinn sonderen spass ")
Ich habe bei meinem ersten Nuri mit FY-21 die "Autostart" Funktion teils genutzt. Einfach Loiter-Mode Aktiviert, Gas rein und den Nuri weggeworfen, der stieg dann schön auf Höhe und Kreiste. in der Zeit konnt man sich gemütlich hinsetzten, Brille auf und los.
Auto-Landing, naja, wenn der RTH Aktiviert ist kreist das Ding über dir und kommt auch irgendwo da sauber runter wenn der Akku leer geht ;_) Zumindest wenn der Flieger bei zu wenig Speed nicht in den stall geht.
Auto-Landing, naja, wenn der RTH Aktiviert ist kreist das Ding über dir und kommt auch irgendwo da sauber runter wenn der Akku leer geht ;_) Zumindest wenn der Flieger bei zu wenig Speed nicht in den stall geht.
Das hier hat einen Autolanding-Modus für Flächenflieger. Ich habe es auch schon im Einsatz gesehen - funktioniert recht gut auf einer geräumigen Wiese. Es kann auch "Assisted Launch" - aber wohl nicht vom Boden.
Allerdings hat das System einige Besonderheiten die ich persönlich beim Zuschauen nicht so gut fand (seltsame Steuerung im Fly-by-Wire, Programmierer muss einem freischalten dass man weiter als ein paar hundert Meter vom Startpunkt weg fliegen kann etc)
Allerdings hat das System einige Besonderheiten die ich persönlich beim Zuschauen nicht so gut fand (seltsame Steuerung im Fly-by-Wire, Programmierer muss einem freischalten dass man weiter als ein paar hundert Meter vom Startpunkt weg fliegen kann etc)
Auf die eigendliche Frage, was für sensoren und so vorhanden sein sollten:
Zum einen währe beispielsweise eine Ultraschall- abstandsmessung, um die entfernung zum boden zu messen sinnvoll.
Es müsste wissen von wo der wind kommt, (wäre zumindest besser so)
dann wars das eigendlich auch schon, den rest würde die software übernehmen (zumindest für assisted landing).
soll er wirklich autonom landen, müssten informationen vorhanden sein, auf welchem gebiet landen möglich ist, und es müssten hindernisse erkennbar sein, beispielsweise auch via ultraschall, haben da mal mit nem asuro rumgebastelt.
es ist auch theoretisch möglich ,die videosignale auswerten zu lassen um hindernisse zu erkennen, was allerdings mehr rechenarbeit erfordert als ein arduino zur verfügung stellt....
Zum einen währe beispielsweise eine Ultraschall- abstandsmessung, um die entfernung zum boden zu messen sinnvoll.
Es müsste wissen von wo der wind kommt, (wäre zumindest besser so)
dann wars das eigendlich auch schon, den rest würde die software übernehmen (zumindest für assisted landing).
soll er wirklich autonom landen, müssten informationen vorhanden sein, auf welchem gebiet landen möglich ist, und es müssten hindernisse erkennbar sein, beispielsweise auch via ultraschall, haben da mal mit nem asuro rumgebastelt.
es ist auch theoretisch möglich ,die videosignale auswerten zu lassen um hindernisse zu erkennen, was allerdings mehr rechenarbeit erfordert als ein arduino zur verfügung stellt....
er kann grundsätzlich alles, aber eben keine videoauswertung in dem sinne, und den exacten abstand zum boden kann er auch nicht wissen, da er nur ein gps signal hat, dieses kann er zwar mit den gps-coords vergleichen, an denen er gestartet ist, ist aber 20 meter weiter ein hügel, weiß dieses der APM nicht, und würde gegebenenfalls in den hügel einschlagen beim landen, ... daher Ultraschall zur bestimmung der exakten entfernung über grund,... ein variometer währe evtl auch noch hilfreich, um die sinkgeschwindigkeit zu kontrollieren, wobei das auch mit gps und gyro möglich währe,...
@butcher. wir spielen ja mit einem APM1 umher. Es liegt auch ein Ultraschall und ein Airspeedsensor umher und gps ist immer drann. Bisher machen wir es so wie schon vorgeschlagen. Loitermode an, wegwerfen und kreisen lassen. Schön auf den Stuhl unter dem Sonnenschirm platz nehmen und den Flieger übernehmen.
Nun haben wir aber im Misson Planer die funktionen Take Off und Land gefunden und es stellte sich natürlich sofort die frage ob das mit dem Starten und Landen bei einem Flieger mit Fahrwerk quasi auf knopfdruck geht.
Das passiert halt wenn erwachsene kinder spielen^^
Wenn ich das also richt verstanden habe, sollte das grundsätzlich funktionieren?! Na dann werden wir das doch mal testen wenn dieses ätzdende wetter endlich mal etwas sonne statt regen bringt. Mann wie das wetter hier nervt.
Nun haben wir aber im Misson Planer die funktionen Take Off und Land gefunden und es stellte sich natürlich sofort die frage ob das mit dem Starten und Landen bei einem Flieger mit Fahrwerk quasi auf knopfdruck geht.
Das passiert halt wenn erwachsene kinder spielen^^
Wenn ich das also richt verstanden habe, sollte das grundsätzlich funktionieren?! Na dann werden wir das doch mal testen wenn dieses ätzdende wetter endlich mal etwas sonne statt regen bringt. Mann wie das wetter hier nervt.
ich denke mal das sind beides keine i2c sensoren oder?
der airspeed sensor wird an den 3 poligen anschluss gesteckt.

Un der Sonar Sensor kommt an den gleichen anschluss

Ich glaube also nicht das es geht und ich habe auch keine lust etwas zu beschädigen.
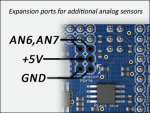
Soweit ich die Wikis verstanden habe sind das anlaog sensoren, ich glaube ich muss den expansionsport nutzen und den quellcode anpassen. siehe http://code.google.com/p/ardupilot-mega/wiki/Analog
Mein englisch ist aber leider zu mies als das ich das sofort verstehe was ich machen muss. ich werde mich mal mit meiner Tochter zusammen einlesen, was sich immer sehr mühsam gestaltet weil die so gar kein hang zu technik hat^^
Leider ist der DE bereich der wiki im grunde eine kopie der EN version.
Wenn ich des Englischen mächtig wäre wüde ich mich ja hinsetzten und die eindeutschen. als frührentner hat man für sowas zeit^^ aber ich denke ich werde mal einen Englisch Kurs an der VHS belegen, das hilft sicher auch für´s erste.
der airspeed sensor wird an den 3 poligen anschluss gesteckt.
Un der Sonar Sensor kommt an den gleichen anschluss
Ich glaube also nicht das es geht und ich habe auch keine lust etwas zu beschädigen.
Soweit ich die Wikis verstanden habe sind das anlaog sensoren, ich glaube ich muss den expansionsport nutzen und den quellcode anpassen. siehe http://code.google.com/p/ardupilot-mega/wiki/Analog
Mein englisch ist aber leider zu mies als das ich das sofort verstehe was ich machen muss. ich werde mich mal mit meiner Tochter zusammen einlesen, was sich immer sehr mühsam gestaltet weil die so gar kein hang zu technik hat^^
Leider ist der DE bereich der wiki im grunde eine kopie der EN version.
Wenn ich des Englischen mächtig wäre wüde ich mich ja hinsetzten und die eindeutschen. als frührentner hat man für sowas zeit^^ aber ich denke ich werde mal einen Englisch Kurs an der VHS belegen, das hilft sicher auch für´s erste.

