Moin,
also ich bin ja nicht so der NonPlusUltraCopter Experte. Hin und wieder schubse ich mal so ein Teil durch die Luft, warum auch nicht. Ich hab mir vor Jahren mal selbst einen zusammen gebaut und versuche, den gerade wieder ins Leben zu bringen. Vielleicht gibts ja hier einen Experten, der mir helfen kann.
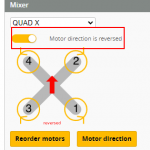
Ist ein 5Zoll, da ist ein OmniNXT F7 mit 4in1 ESC verbaut. Den hab ich jetzt mal auf die neue Version geflasht. Im Betaflight reagieren auch alles Gyros richtig: Schalte ich die Motoren scharf reagieren die Motoren so, wie sie sollen. Es laufen auch alle in die richtige Richtung. Wenn ich aber Throttle hinzugebe, dann laufen die Motoren ungleich hoch und der Copter fängt unkontrolliert an, zu wobblen. Ich kann danach auch den Throttle nicht mehr zurücksetzen, die Motoren spielen völlig verrückt. Erst nach dem disarmen ist Ruhe im Karton. Ich habs auch mal mit den PID Einstellungen rumgespielt, aber das ist mittlerweile so komplex geworden, da steig ich einfach nicht durch. Brauchte auch alles nicht den gewünschten Effekt.
Ich hab ihn aus Spaß gestern Nachmittag mal draußen auf der Terrasse mit Probs starten lassen: Kaum Gas rein, hauts die Motoren auf keine Ahnung wohin und er geht aus. Macht nen kleinen Hopser und dann wars das. Was kann das sein? Arming Angle steht auf -180, beim armen ist alles normal, da laufen die Motoren im Idle. Er reagiert auch auf Yaw, Pitch und Roll, wie er soll. Nur wenn ich Gas geben will, spielt er total verrückt und geht sofort aus. Er "schaukelt sich hoch", wenn ich Gas gebe, wackelt unkontrollierbar in der Hand.
Steht auf DShot600, andere Protokolle hab ich versucht, dass isses nicht. Hab den Magnetometer und die Beschleunigungssensoren auch kalibriert, alles scheint normal.
Was kann das sein? Ich kann auch gerne mal ein Video hier einstellen oder die Logs, wenn mir einer sagt, was hilfreich wäre")
Danke!
also ich bin ja nicht so der NonPlusUltraCopter Experte. Hin und wieder schubse ich mal so ein Teil durch die Luft, warum auch nicht. Ich hab mir vor Jahren mal selbst einen zusammen gebaut und versuche, den gerade wieder ins Leben zu bringen. Vielleicht gibts ja hier einen Experten, der mir helfen kann.
Ist ein 5Zoll, da ist ein OmniNXT F7 mit 4in1 ESC verbaut. Den hab ich jetzt mal auf die neue Version geflasht. Im Betaflight reagieren auch alles Gyros richtig: Schalte ich die Motoren scharf reagieren die Motoren so, wie sie sollen. Es laufen auch alle in die richtige Richtung. Wenn ich aber Throttle hinzugebe, dann laufen die Motoren ungleich hoch und der Copter fängt unkontrolliert an, zu wobblen. Ich kann danach auch den Throttle nicht mehr zurücksetzen, die Motoren spielen völlig verrückt. Erst nach dem disarmen ist Ruhe im Karton. Ich habs auch mal mit den PID Einstellungen rumgespielt, aber das ist mittlerweile so komplex geworden, da steig ich einfach nicht durch. Brauchte auch alles nicht den gewünschten Effekt.
Ich hab ihn aus Spaß gestern Nachmittag mal draußen auf der Terrasse mit Probs starten lassen: Kaum Gas rein, hauts die Motoren auf keine Ahnung wohin und er geht aus. Macht nen kleinen Hopser und dann wars das. Was kann das sein? Arming Angle steht auf -180, beim armen ist alles normal, da laufen die Motoren im Idle. Er reagiert auch auf Yaw, Pitch und Roll, wie er soll. Nur wenn ich Gas geben will, spielt er total verrückt und geht sofort aus. Er "schaukelt sich hoch", wenn ich Gas gebe, wackelt unkontrollierbar in der Hand.
Steht auf DShot600, andere Protokolle hab ich versucht, dass isses nicht. Hab den Magnetometer und die Beschleunigungssensoren auch kalibriert, alles scheint normal.
Was kann das sein? Ich kann auch gerne mal ein Video hier einstellen oder die Logs, wenn mir einer sagt, was hilfreich wäre
Danke!