
Hallo,
vergangene Woche wäre mir die völlig unvernünftige Missachtung von viel zu viel Wind für's Quadcopter-Fliegen fast (sehr) teuer zu stehen gekommen: Ruck-zuck war der 330XS sehr weit weg abgetrieben und über einem -eigentlich nicht allzu nahe gelegenen- Waldstück abgestürzt.
1 Tag (ca. 4h Netto-Suchzeit und sehr viel Glück) später konnten wir den Quadrokopter tatsächlich wieder finden. Mehr als 450m weit vom Startpunkt entfernt, ca. 150m weiter als vermutet, mittem im Wald.
Statt dem teuren Totalverlust des Gaui incl. FPV-Kamera und 5.8GHz Sender, gab es also glücklicherweise nur einen relativ kleinen Schaden in Form von zwei tiefentladenen Lipos (jeweils runter auf < 1V pro Zelle und inzwischen entsorgt) und 4 zerbröselten (nagelneuen! :/") Propellern.
Propellern.
Der Rahmen des 330XS war ebenfalls an 2 Stellen durchgebrochen. Dieser Schaden wäre zwar vermutlich noch reparabel gewesen, aber dieses mal habe ich mich nun endlich lieber an den Neubau eines Rahmens gemacht.
Mit dem zusätzlichen FPV-Equipment war es auf dem kleinen Gaui eh schon sehr eng und ich hatte das Gefühl, dass etwas mehr Spannweite etwa mehr Ruhe in den Flug (vor allem mit FPV) bringen könnte.
Da ich seit längerem einen OpenSource-3D-Drucker ("MakerBot") besitze und benutze, habe ich selbstverständlich möglichst viele Teile des neuen Rahmens "ausgedruckt".
Der gesamte Vorgang ist in meinem (englisch-sprachigen) Blog "Pleasant Hardware" dokumentiert und die 3D-Konstruktionen für den Rahmen sind auf Thingiverse.com veröffentlicht.
Nachfolgend aber trotzdem eine kurze Zusammenfassung des Bauberichts auf deutsch und ein paar Bilder.

Vielleicht erst einmal ein paar Informationen zum 3D-Drucker.
Der MakerBot ist ein sogenannter FDM-Drucker. Es handelt sich dabei um ein OpenSource-Projekt, das man als Bausatz erwerben kann und selbst zusammenbauen muss.
Es gibt zwar diverse Einschränkungen, was man mit diesen Druckern für Objekte herstellen kann (Maximalgröße, "Druckauflösung" usw), aber mit etwas Erfahrung kann man damit sehr einfach Objekte erzeugen, die ansonsten nur wesentlich aufwendiger (oder gar nicht) herzustellen wären.
Als Material wird meistens (auch im meine Fall) ABS-Plastik verwendet (also das gleiche Material, aus dem auch Legos hergestellt werden).
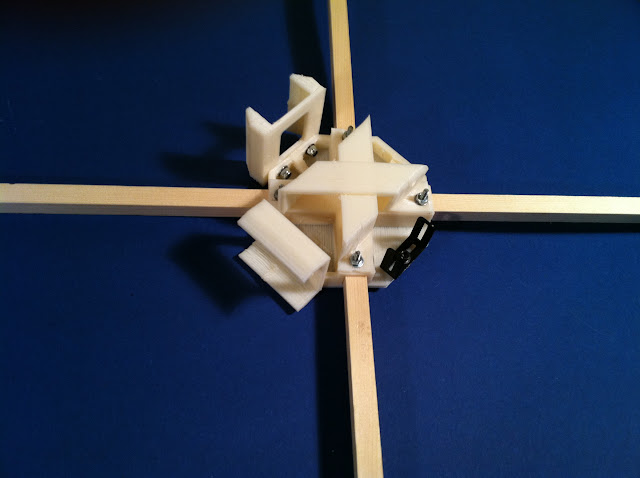
Für die Ausleger habe ich 10x10mm Holzleisten verwendet (billig, stabil, leicht!). Jeder Ausleger ist 25cm lang, der Gesamtdurchmesser des Quadrocopters ist daher gut 50cm.
Es wurden also noch folgende Teile benötigt:
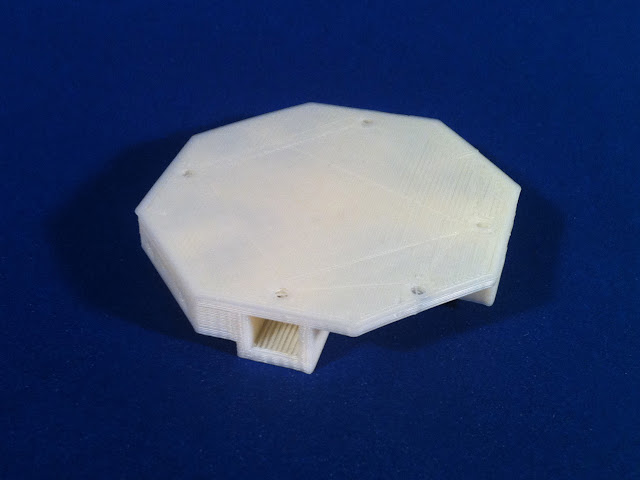
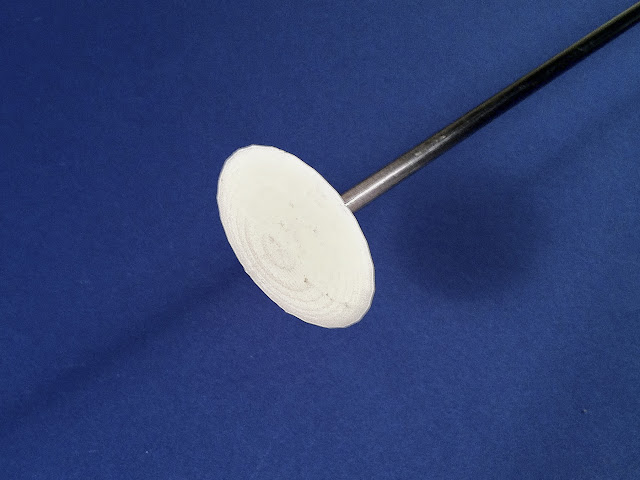
Hier ist ein Foto der bereits ausgedruckten Mittel-Plattform (Unter-und Oberansicht):
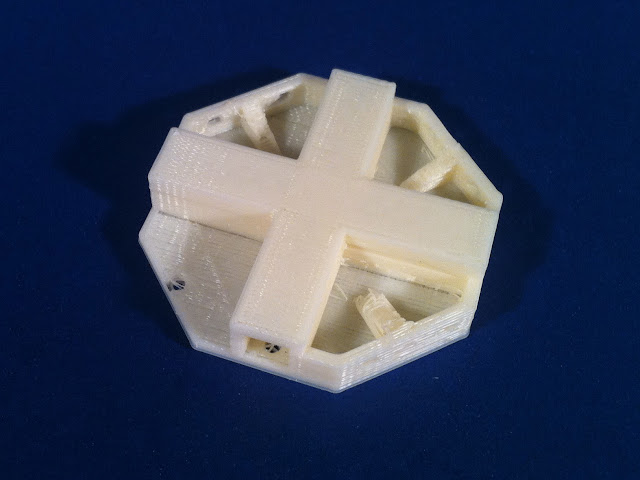
Die Ausleger werden mit Hilfe von je einer M3x25mm Gewindeschraube gesichert. Diese Schrauben halten auf der Unterseite auch die X-förmige Halterung, in der die Strom-Sensor-Platine des OSD verstaut wird. Für den AV-Sender und die OSD-Hauptplatine wurden separate Halterungen ausgedruckt und an der Mittel-Plattform festgeschraubt. An der "Vorderseite" der Plattform ist im folgenden Bild bereits auch die Kamerahalterung für die KX171 festgeschraubt:
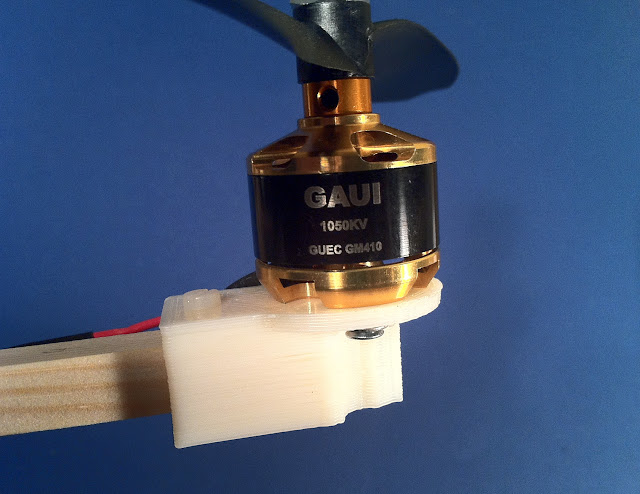
Die vier Motorplattformen werden ebenfalls von einer Gewindeschraube gesichert. In diesem Fall habe ich M3x20mm Nylon-Schrauben verwendet. Einerseits um Gewicht zu sparen, andererseits um eine Soll-Bruchstelle für Bruchlandungen einzubauen.
Nachfolgend ein Bild des bereits mit Elektronik vollgestopften Chassis (von unten):
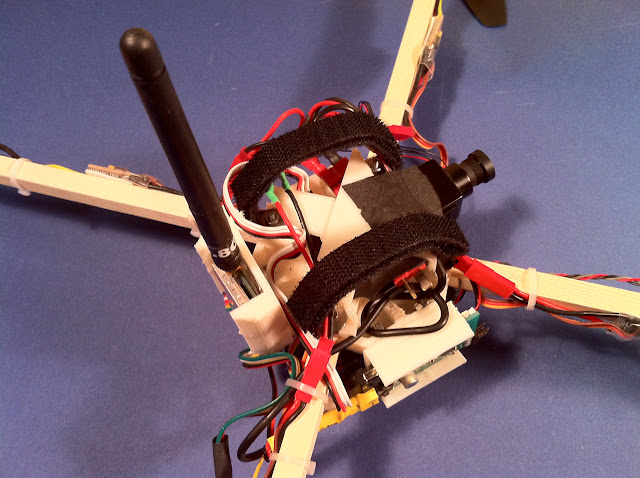
Die Klettbänder zum Festschnallen des Lipos sind ebenfalls mit den vier M3-Gewindeschrauben befestigt, die bereits die Ausleger und die X-förmige Halterung sichern. In dieser ist bereits die Strom-Sensor-Platine untergebracht. Das schwarze Klebeband an der Kamera dient nur dazu, die darunter liegenden Kabel (GPS-Signalleitungen, Kamera-Kabel etc.) an ihrer Stelle zu halten.
Hinten ist der ImmersionRC 5.8GHz AV-Sender in seiner Halterung zu sehen (die Sende-Antenne steht später also senkrecht, frei nach unten ab). Ebenfalls zu erkennen ist die Cyclops Easy OSD-Hauptplatine in ihrer Halterung an der Seite.
Hier der gleiche Aufbau von der Seite her gesehen:
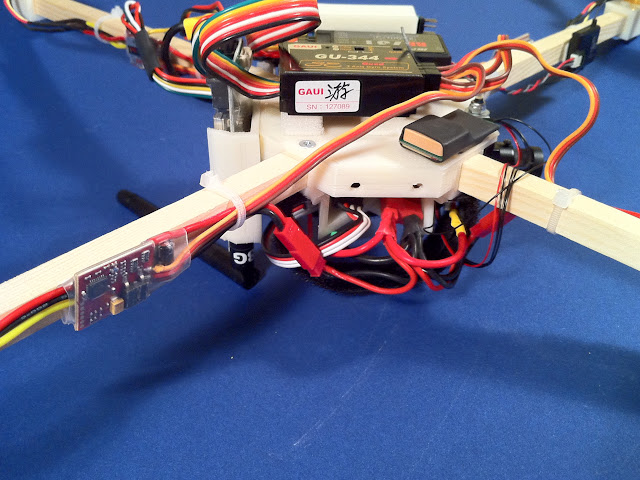
Vorne rechts ist die GPS-Tochterplatine für das OSD mit doppelseitigem Klebeband befestigt.
In der Mitte thront der Gaui-Gyro-Controller auf seinem Schaumstoffbett. Und im Hintergrund sieht man daneben den RC-Receiver (JR).
Und hier noch ein Bild von vorne:

Der gesamte Quadrocopter wiegt flugfertig (d.h. incl. Lipo, FPV-Ausrüstung und (provisorischem) Landegestell) gut 650 Gramm:

Leider konnte ich (wegen Regen) noch keinen Probeflug im Freien machen. Ich konnte mich aber nicht zurückhalten zumindest einen sehr kurzen Test in meinem Wohnzimmer zu machen. Leider ist es dort (zumindest für mich als Piloten!) viel zu eng zum Fliegen, sodass ich mit dem Quadrocopter lediglich ein paar kurze Test-Schwebeflug-Hopser machen konnte. Das Ganze ist bei YouTube als kurzes Video verewigt.
Als Landegestell sind derzeit provisorisch 6mm-Aluröhrchen montiert. Später sind hierfür 6mm-Carbonstäbe vorgesehen, die dann auch richtige (gedruckte...) Lande-Füsschen verpasst bekommen. Die sind derzeit allerdings noch nicht fertig, weil ich die endgültigen Beinchen gerne mit einer Federung versehen würde. Und daran arbeite ich derzeit noch...

vergangene Woche wäre mir die völlig unvernünftige Missachtung von viel zu viel Wind für's Quadcopter-Fliegen fast (sehr) teuer zu stehen gekommen: Ruck-zuck war der 330XS sehr weit weg abgetrieben und über einem -eigentlich nicht allzu nahe gelegenen- Waldstück abgestürzt.
1 Tag (ca. 4h Netto-Suchzeit und sehr viel Glück) später konnten wir den Quadrokopter tatsächlich wieder finden. Mehr als 450m weit vom Startpunkt entfernt, ca. 150m weiter als vermutet, mittem im Wald.
Statt dem teuren Totalverlust des Gaui incl. FPV-Kamera und 5.8GHz Sender, gab es also glücklicherweise nur einen relativ kleinen Schaden in Form von zwei tiefentladenen Lipos (jeweils runter auf < 1V pro Zelle und inzwischen entsorgt) und 4 zerbröselten (nagelneuen! :/
Propellern.Der Rahmen des 330XS war ebenfalls an 2 Stellen durchgebrochen. Dieser Schaden wäre zwar vermutlich noch reparabel gewesen, aber dieses mal habe ich mich nun endlich lieber an den Neubau eines Rahmens gemacht.
Mit dem zusätzlichen FPV-Equipment war es auf dem kleinen Gaui eh schon sehr eng und ich hatte das Gefühl, dass etwas mehr Spannweite etwa mehr Ruhe in den Flug (vor allem mit FPV) bringen könnte.
Da ich seit längerem einen OpenSource-3D-Drucker ("MakerBot") besitze und benutze, habe ich selbstverständlich möglichst viele Teile des neuen Rahmens "ausgedruckt".
Der gesamte Vorgang ist in meinem (englisch-sprachigen) Blog "Pleasant Hardware" dokumentiert und die 3D-Konstruktionen für den Rahmen sind auf Thingiverse.com veröffentlicht.
Nachfolgend aber trotzdem eine kurze Zusammenfassung des Bauberichts auf deutsch und ein paar Bilder.
Vielleicht erst einmal ein paar Informationen zum 3D-Drucker.
Der MakerBot ist ein sogenannter FDM-Drucker. Es handelt sich dabei um ein OpenSource-Projekt, das man als Bausatz erwerben kann und selbst zusammenbauen muss.
Es gibt zwar diverse Einschränkungen, was man mit diesen Druckern für Objekte herstellen kann (Maximalgröße, "Druckauflösung" usw), aber mit etwas Erfahrung kann man damit sehr einfach Objekte erzeugen, die ansonsten nur wesentlich aufwendiger (oder gar nicht) herzustellen wären.
Als Material wird meistens (auch im meine Fall) ABS-Plastik verwendet (also das gleiche Material, aus dem auch Legos hergestellt werden).
Für die Ausleger habe ich 10x10mm Holzleisten verwendet (billig, stabil, leicht!). Jeder Ausleger ist 25cm lang, der Gesamtdurchmesser des Quadrocopters ist daher gut 50cm.
Es wurden also noch folgende Teile benötigt:
- Ein Mittelstück, das die vier Ausleger verbindet und eine Befestigungsmöglichkeit für die Elektronik bietet
- Vier Motor-Plattformen
Hier ist ein Foto der bereits ausgedruckten Mittel-Plattform (Unter-und Oberansicht):
Die Ausleger werden mit Hilfe von je einer M3x25mm Gewindeschraube gesichert. Diese Schrauben halten auf der Unterseite auch die X-förmige Halterung, in der die Strom-Sensor-Platine des OSD verstaut wird. Für den AV-Sender und die OSD-Hauptplatine wurden separate Halterungen ausgedruckt und an der Mittel-Plattform festgeschraubt. An der "Vorderseite" der Plattform ist im folgenden Bild bereits auch die Kamerahalterung für die KX171 festgeschraubt:
Die vier Motorplattformen werden ebenfalls von einer Gewindeschraube gesichert. In diesem Fall habe ich M3x20mm Nylon-Schrauben verwendet. Einerseits um Gewicht zu sparen, andererseits um eine Soll-Bruchstelle für Bruchlandungen einzubauen.
Nachfolgend ein Bild des bereits mit Elektronik vollgestopften Chassis (von unten):
Die Klettbänder zum Festschnallen des Lipos sind ebenfalls mit den vier M3-Gewindeschrauben befestigt, die bereits die Ausleger und die X-förmige Halterung sichern. In dieser ist bereits die Strom-Sensor-Platine untergebracht. Das schwarze Klebeband an der Kamera dient nur dazu, die darunter liegenden Kabel (GPS-Signalleitungen, Kamera-Kabel etc.) an ihrer Stelle zu halten.
Hinten ist der ImmersionRC 5.8GHz AV-Sender in seiner Halterung zu sehen (die Sende-Antenne steht später also senkrecht, frei nach unten ab). Ebenfalls zu erkennen ist die Cyclops Easy OSD-Hauptplatine in ihrer Halterung an der Seite.
Hier der gleiche Aufbau von der Seite her gesehen:
Vorne rechts ist die GPS-Tochterplatine für das OSD mit doppelseitigem Klebeband befestigt.
In der Mitte thront der Gaui-Gyro-Controller auf seinem Schaumstoffbett. Und im Hintergrund sieht man daneben den RC-Receiver (JR).
Und hier noch ein Bild von vorne:
Der gesamte Quadrocopter wiegt flugfertig (d.h. incl. Lipo, FPV-Ausrüstung und (provisorischem) Landegestell) gut 650 Gramm:
Leider konnte ich (wegen Regen) noch keinen Probeflug im Freien machen. Ich konnte mich aber nicht zurückhalten zumindest einen sehr kurzen Test in meinem Wohnzimmer zu machen. Leider ist es dort (zumindest für mich als Piloten!) viel zu eng zum Fliegen, sodass ich mit dem Quadrocopter lediglich ein paar kurze Test-Schwebeflug-Hopser machen konnte. Das Ganze ist bei YouTube als kurzes Video verewigt.
Als Landegestell sind derzeit provisorisch 6mm-Aluröhrchen montiert. Später sind hierfür 6mm-Carbonstäbe vorgesehen, die dann auch richtige (gedruckte...) Lande-Füsschen verpasst bekommen. Die sind derzeit allerdings noch nicht fertig, weil ich die endgültigen Beinchen gerne mit einer Federung versehen würde. Und daran arbeite ich derzeit noch...


