
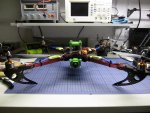
Ich möchte einmal meinen ersten Quadrokopter zeigen:
Es ist ein chinesischer X525 V3 Bausatz mit MWC V2.5 Board.
Zusätzlich habe ich noch ein GPS Modul mit I2C Wandler und ein Fat Shark Predator V2 Set verbaut.
Die zusätzlichen (grünen) Teile habe ich selbst entworfen und auf dem 3D Drucker ausgedruckt.


Fliegen tut der Quadrokopter ganz anständig, lediglich das GPS Hold macht noch etwas Probleme (fliegt immer größere Kreise). Ich sollte eventuell noch die Elektronik entkoppeln und das GPS an einer anderen Position Montieren.
Die Spannungsversorgung mus ich auch noch etwas abändern. Der Anschluss für den Akku sollte z.b. von unten kommen. Keine Ahnung, was ich mir dabei gedacht hatte, den oben anzulöten.
Es ist ein chinesischer X525 V3 Bausatz mit MWC V2.5 Board.
Zusätzlich habe ich noch ein GPS Modul mit I2C Wandler und ein Fat Shark Predator V2 Set verbaut.
Die zusätzlichen (grünen) Teile habe ich selbst entworfen und auf dem 3D Drucker ausgedruckt.
Fliegen tut der Quadrokopter ganz anständig, lediglich das GPS Hold macht noch etwas Probleme (fliegt immer größere Kreise). Ich sollte eventuell noch die Elektronik entkoppeln und das GPS an einer anderen Position Montieren.
Die Spannungsversorgung mus ich auch noch etwas abändern. Der Anschluss für den Akku sollte z.b. von unten kommen. Keine Ahnung, was ich mir dabei gedacht hatte, den oben anzulöten.
")

