Hallo Gemeinde,
kann mir jemand bei meinem Copterproblem helfen. Ich weiß nicht mehr weiter...
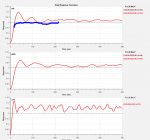
Beim gemütlichen Vorwärtsflug schwank manchmal der Copter auf YAW, ganz leicht links/rechts, FPV-Bild und 4K-Camera-Bild.
Fliegt man etwas flotter in die Kurven oder mehr Speed, dann kann es sein das der Horizont wegdriftet bzw. schräg stehen bleibt.
Es ist ein 5" mit GPS und Kameramount für einfache Cinematikähnliche Flüge, hauptsächlich um Seglern oder ähnliche Geräte meiner Kollegen nachzufliegen und zu filmen. Der driftende Horizont macht mir hauptsächlich Probleme beim GPS-Coming-Home. Sonst wird der Copter natürlich in Acro geflogen.
Mit den PID-Einstellungen bin ich eigentlich ganz zufrieden, kaum Propwash, kein Zittern hörbar.
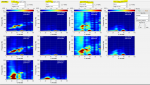
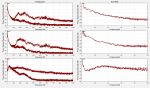
Nur mit den Filtereinstellungen und Blackboxdaten komm ich nicht klar, neue Welt für mich.
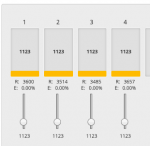
War ja glücklich das ich RPM-Filter aktivieren hinbekommen habe.
Sämtliche Schrauben am Quad wurden nachgezogen, sind definitiv fest.
Propeller mehrfach getauscht, keine Änderung.
RX und VTX wurden in der Position im Quad getauscht damit weniger Kabel beim FC sind die evtl. Stören. Mit GPS kommt dann langsam bissl Kabelsalat rein, vorallem wenn wenig Platz ist.
Egodrift 5" TrueX, 4s,Hobbywing F4 Omnibus Stack, Betaflight 4.2.9, Brotherhobby Returner Motoren, Foxeer Cam, TrampHV-VTX
kann mir jemand bei meinem Copterproblem helfen. Ich weiß nicht mehr weiter...
Beim gemütlichen Vorwärtsflug schwank manchmal der Copter auf YAW, ganz leicht links/rechts, FPV-Bild und 4K-Camera-Bild.
Fliegt man etwas flotter in die Kurven oder mehr Speed, dann kann es sein das der Horizont wegdriftet bzw. schräg stehen bleibt.
Es ist ein 5" mit GPS und Kameramount für einfache Cinematikähnliche Flüge, hauptsächlich um Seglern oder ähnliche Geräte meiner Kollegen nachzufliegen und zu filmen. Der driftende Horizont macht mir hauptsächlich Probleme beim GPS-Coming-Home. Sonst wird der Copter natürlich in Acro geflogen.
Mit den PID-Einstellungen bin ich eigentlich ganz zufrieden, kaum Propwash, kein Zittern hörbar.
Nur mit den Filtereinstellungen und Blackboxdaten komm ich nicht klar, neue Welt für mich.
War ja glücklich das ich RPM-Filter aktivieren hinbekommen habe.
Sämtliche Schrauben am Quad wurden nachgezogen, sind definitiv fest.
Propeller mehrfach getauscht, keine Änderung.
RX und VTX wurden in der Position im Quad getauscht damit weniger Kabel beim FC sind die evtl. Stören. Mit GPS kommt dann langsam bissl Kabelsalat rein, vorallem wenn wenig Platz ist.
Egodrift 5" TrueX, 4s,Hobbywing F4 Omnibus Stack, Betaflight 4.2.9, Brotherhobby Returner Motoren, Foxeer Cam, TrampHV-VTX
Anhänge
-
 199,8 KB Aufrufe: 12
199,8 KB Aufrufe: 12 -
 223,9 KB Aufrufe: 13
223,9 KB Aufrufe: 13 -
 203,5 KB Aufrufe: 14
203,5 KB Aufrufe: 14 -
 2,7 MB Aufrufe: 16
2,7 MB Aufrufe: 16 -
 2,5 MB Aufrufe: 17
2,5 MB Aufrufe: 17
")