Baumarkt - Quadrocopter (H-Frame) für GoPro
Hallo zusammen
Tag 0
dies ist mein erster Versuch, einen Copter von Grund auf selber aufzubauen. Bisher nenn ich einen umgebauten DJI F550 Hexacopter mein eigen (siehe hier:http://fpv-community.de/showthread....-andere-Copter&p=256716&viewfull=1#post256716 )
Da dieser aber für kleine FPV- und Erkundungsflüge für Zwischendurch zu gross ist, habe ich beschlossen, aus den Überresten meiner "Lehrkäufe" einen neuen Quadrocopter aufzubauen. Mit dem Ziel, nur Baumaterialien zu verwenden, welche ich im örtlichen Baumarkt kaufen kann....und glaubt mir, da ist die Auswahl leider seeeeehr gering....aber ein Versuch is wert.
Folgende Komponenten werde ich verbauen:
Der Copter soll auf einem H-Rahmen mit 15x15mm Aluvierkant-Rohren aufbauen. Sehr simpel und einfach zu bauen. Dies auch darum, weil ich keine Fräse (ich habe nur eine kleine Tischbohrmaschine & Dremel) habe und auch nicht auf externe Dienstleistungen zurückgreifen will...alles soll in Eigenregie gebaut werden.
Props sollen bis 12" (in diesem Fall Graupner 12"x6) montierbar sein. Aufgrund dieser Vorgaben ist folgende Zeichnung entstanden. Die gesamte Elektronik wird zwischen den Längsstreben eingebaut. Das Verteilerboard und die ESC liegend auf der mittleren Ebene. Die FC und der Empfänger eine Ebene höher. Der Akku wird schlussendlich unten an den Rahmen angehängt, geschützt durch einen kleinen Alukäfig. Die Motorkabel werden in das Aluprofil verelgt.

So nach ersten Einschätzungen werde ich ohne Akku, Kamera und FPV Elektronik auf ein Gewicht von circa 1100g kommen. Dies bei einem Motorenabstand von 360mm. Natürlich könnte man mehr Gewicht mit Nylo- oder Titanschraube, Kohlefaser-Elementen, usw sparen, aber dies gibt mein Baumarkt leider nicht her.
Falls ihr noch irgendwelche Tipps oder grundlegende Verbesserungen habt, immer her damit, bin da vollkommen offen und würde mich freuen.
Tag 1
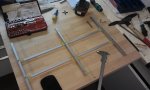
Der erste halbe Nachmittag habe ich nun damit verbracht, das Rohmaterial zu vermessen und dementsprechend anzubohren und sägen. Die Vierkantrohre habe ich zur Zeit mit L-Winkeln miteinander verschraubt...ist leider nicht die gewichtssparsamste Lösung, aber im moment leider die einzige, welche mit Baumarktmaterial genug stabil ist.
Auch die untere Centerplatte - wenn man der so sagen kann - habe ich grob zurechtgeschnitten. Sie besteht aus 0.8mm dicken Alublech. Dies wird auch noch gebohrt um hier wenigstens etwas an Gewicht zu sparen.
Das ganze kurz mal zusammenverschraubt inkl. den 4 Motoren sieht dann wie folgt aus:


Das ganze wiegt bereits 680g....
morgen gibts dann wieder mehr....
Tag 3
und es geht weiter;
habe mich heute nochmals an den rahmen gesetzt, da dieser doch "etwas" zu schwer war. Die 2 innenliegenden 15mm Vierkant-Alurohre habe ich durch 10mm ersetzt und konnte daher 30g einsparen. Ebenso habe ich die schweren L-Winkel durch selbstgeschnittene Alu-Winkel - welche nun seitlich eingesetzt worden sind - nochmals 50g gespart.
Das untere Alublech habe ich durch eine 1.0mm ABS-Platte ersetzt. Gespart habe ich hier nochmals 20g - wie stabil das ist, wird sich zeigen, auf jeden Fall sollte es vibrationsdämpfend für die FC sein, welche darauf installiert.
Nach den Lötarbeiten (ESC an Stromverteiler angelötet), habe ich alles mal zusammen auf die Waage gelegt und komme komplett auf 940g, d.h. inkl. alles, aber ohne Akku und GoPro. Die Aluvierkantrohre werden noch weiter aufgebohrt, ebenso die ABS-Platten (die obere ist momentan eh nur provisorisch) somit kann ich mit gut Glück noch weiter 20-30g einsparen.
Nur schon die 4 Motoren wiegen zusammen 340g!!! ...aber dafür haben die auch flott Schub mit den 12"ern von Graupner.
Aber hier nun mal ein paar Bilder von den heutigen Arbeitsschritten.




Tag 4
Viel hat sich eigentlich noch nicht getan seit dem letzten mal, jedoch sind sicher wieder 3-4 Std nur am probieren, entwerfen und wieder verwerfen diverser Teil draufgegangen. Die obere ABS-Platte habe ich neu gemacht. Auch die die Landfüsse wurden geschnitten (je nach Stabilität kommen da noch ein paar Löcher rein) und montiert.
Zuoberst muss nun noch zum Schutz der Naza und der Empfänger&Telemetrie-Combo ein Schutz installiert werden. In welcher Ausführung muss ich aber noch überlegen.
Eigentlich wollte ich ja die Motorkabel in die Aluträger verlegen, jedoch passen die nun nicht mehr in die 10x10er Vierkant, daher habe ich diese nun simpel aussen befestigt.....Vorneweg: kürzen möchte ich die Kabel nicht.
Habe heute auch mal kurz die Props montiert und einen ersten Flugversuch indoor versucht und siehe da, er fliegt !!!!!") )))
)))
nun folgt noch die GoProhalterung und die Akkubefestigung....anschliessend, wenn alles passt, wird nochmal schon sauber geschliffen und gesprayed




.....
Hallo zusammen
Tag 0
dies ist mein erster Versuch, einen Copter von Grund auf selber aufzubauen. Bisher nenn ich einen umgebauten DJI F550 Hexacopter mein eigen (siehe hier:http://fpv-community.de/showthread....-andere-Copter&p=256716&viewfull=1#post256716 )
Da dieser aber für kleine FPV- und Erkundungsflüge für Zwischendurch zu gross ist, habe ich beschlossen, aus den Überresten meiner "Lehrkäufe" einen neuen Quadrocopter aufzubauen. Mit dem Ziel, nur Baumaterialien zu verwenden, welche ich im örtlichen Baumarkt kaufen kann....und glaubt mir, da ist die Auswahl leider seeeeehr gering....aber ein Versuch is wert.
Folgende Komponenten werde ich verbauen:
- DJI NAZA inkl. GPS
- 4x T-Motor MT2216-11 mit 900kv
- 4x DJI Optio 30A Regler
- AR500 Empfänger von Spektrum (habe diesen noch von einer alten DX5e Anlage, mal schauen ob mir hier 5 Kanäle genügen, sonst muss doch der AR8000 her)
- Stromverteiler Platine Universal ( http://www.koptershop.ch/product_info.php?products_id=111 )
Der Copter soll auf einem H-Rahmen mit 15x15mm Aluvierkant-Rohren aufbauen. Sehr simpel und einfach zu bauen. Dies auch darum, weil ich keine Fräse (ich habe nur eine kleine Tischbohrmaschine & Dremel) habe und auch nicht auf externe Dienstleistungen zurückgreifen will...alles soll in Eigenregie gebaut werden.
Props sollen bis 12" (in diesem Fall Graupner 12"x6) montierbar sein. Aufgrund dieser Vorgaben ist folgende Zeichnung entstanden. Die gesamte Elektronik wird zwischen den Längsstreben eingebaut. Das Verteilerboard und die ESC liegend auf der mittleren Ebene. Die FC und der Empfänger eine Ebene höher. Der Akku wird schlussendlich unten an den Rahmen angehängt, geschützt durch einen kleinen Alukäfig. Die Motorkabel werden in das Aluprofil verelgt.
So nach ersten Einschätzungen werde ich ohne Akku, Kamera und FPV Elektronik auf ein Gewicht von circa 1100g kommen. Dies bei einem Motorenabstand von 360mm. Natürlich könnte man mehr Gewicht mit Nylo- oder Titanschraube, Kohlefaser-Elementen, usw sparen, aber dies gibt mein Baumarkt leider nicht her.
Falls ihr noch irgendwelche Tipps oder grundlegende Verbesserungen habt, immer her damit, bin da vollkommen offen und würde mich freuen.
Tag 1
Der erste halbe Nachmittag habe ich nun damit verbracht, das Rohmaterial zu vermessen und dementsprechend anzubohren und sägen. Die Vierkantrohre habe ich zur Zeit mit L-Winkeln miteinander verschraubt...ist leider nicht die gewichtssparsamste Lösung, aber im moment leider die einzige, welche mit Baumarktmaterial genug stabil ist.
Auch die untere Centerplatte - wenn man der so sagen kann - habe ich grob zurechtgeschnitten. Sie besteht aus 0.8mm dicken Alublech. Dies wird auch noch gebohrt um hier wenigstens etwas an Gewicht zu sparen.
Das ganze kurz mal zusammenverschraubt inkl. den 4 Motoren sieht dann wie folgt aus:
Das ganze wiegt bereits 680g....
morgen gibts dann wieder mehr....
Tag 3
und es geht weiter;
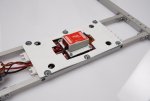
habe mich heute nochmals an den rahmen gesetzt, da dieser doch "etwas" zu schwer war. Die 2 innenliegenden 15mm Vierkant-Alurohre habe ich durch 10mm ersetzt und konnte daher 30g einsparen. Ebenso habe ich die schweren L-Winkel durch selbstgeschnittene Alu-Winkel - welche nun seitlich eingesetzt worden sind - nochmals 50g gespart.
Das untere Alublech habe ich durch eine 1.0mm ABS-Platte ersetzt. Gespart habe ich hier nochmals 20g - wie stabil das ist, wird sich zeigen, auf jeden Fall sollte es vibrationsdämpfend für die FC sein, welche darauf installiert.
Nach den Lötarbeiten (ESC an Stromverteiler angelötet), habe ich alles mal zusammen auf die Waage gelegt und komme komplett auf 940g, d.h. inkl. alles, aber ohne Akku und GoPro. Die Aluvierkantrohre werden noch weiter aufgebohrt, ebenso die ABS-Platten (die obere ist momentan eh nur provisorisch) somit kann ich mit gut Glück noch weiter 20-30g einsparen.
Nur schon die 4 Motoren wiegen zusammen 340g!!! ...aber dafür haben die auch flott Schub mit den 12"ern von Graupner.
Aber hier nun mal ein paar Bilder von den heutigen Arbeitsschritten.
Tag 4
Viel hat sich eigentlich noch nicht getan seit dem letzten mal, jedoch sind sicher wieder 3-4 Std nur am probieren, entwerfen und wieder verwerfen diverser Teil draufgegangen. Die obere ABS-Platte habe ich neu gemacht. Auch die die Landfüsse wurden geschnitten (je nach Stabilität kommen da noch ein paar Löcher rein) und montiert.
Zuoberst muss nun noch zum Schutz der Naza und der Empfänger&Telemetrie-Combo ein Schutz installiert werden. In welcher Ausführung muss ich aber noch überlegen.
Eigentlich wollte ich ja die Motorkabel in die Aluträger verlegen, jedoch passen die nun nicht mehr in die 10x10er Vierkant, daher habe ich diese nun simpel aussen befestigt.....Vorneweg: kürzen möchte ich die Kabel nicht.
Habe heute auch mal kurz die Props montiert und einen ersten Flugversuch indoor versucht und siehe da, er fliegt !!!!!
)))nun folgt noch die GoProhalterung und die Akkubefestigung....anschliessend, wenn alles passt, wird nochmal schon sauber geschliffen und gesprayed
.....
Zuletzt bearbeitet: