Hallo Zusammen,
in einem anderen Thread wurde es angesprochen. Hier ein für den AUAV-X2 bzw. Pixhawk passendes LUA-Script:
https://github.com/Jace25/LUA-Taranis-Pixhawk
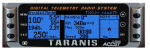
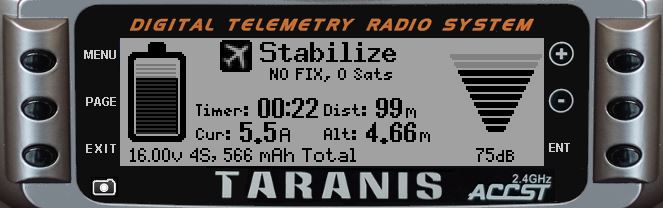
Vielleicht hilft es ja jemandem. Allein beim Autotune finde ich es ehrlich gesagt schon relativ hilfreich, da die Daten nicht auf Schalterstellungen der Taranis, sondern auf den Mavlink Daten vom Arducopter basieren. Dh. wenn ein Flugmode nicht geht, dann steht er auch nicht im Display, sondern der, der stattdessen genommen wird (AltHold statt Loiter, falls kein GPS-Fix, Land statt RTL, usw.)
Die Grafiken basieren auf diesem Script für die NAZE, ich hab es für den APM angepasst, Code rausgeworfen und nur das dringelassen, was ich getestet habe und die Flugmodi ergänzt.
Vorschläge gerne") Ansonsten dürft ihr diesen Beitrag gern auch Bewerten
Ansonsten dürft ihr diesen Beitrag gern auch Bewerten
in einem anderen Thread wurde es angesprochen. Hier ein für den AUAV-X2 bzw. Pixhawk passendes LUA-Script:
https://github.com/Jace25/LUA-Taranis-Pixhawk
Vielleicht hilft es ja jemandem. Allein beim Autotune finde ich es ehrlich gesagt schon relativ hilfreich, da die Daten nicht auf Schalterstellungen der Taranis, sondern auf den Mavlink Daten vom Arducopter basieren. Dh. wenn ein Flugmode nicht geht, dann steht er auch nicht im Display, sondern der, der stattdessen genommen wird (AltHold statt Loiter, falls kein GPS-Fix, Land statt RTL, usw.)
Die Grafiken basieren auf diesem Script für die NAZE, ich hab es für den APM angepasst, Code rausgeworfen und nur das dringelassen, was ich getestet habe und die Flugmodi ergänzt.
Vorschläge gerne
Ansonsten dürft ihr diesen Beitrag gern auch Bewerten