
Hallo,
trendgerecht möchte ich euch in diesem Baubericht euch meine Variante eines Videokopters präsentieren.
Seit Beginn diesen Jahres spukt mir der Gedanke durch den Kopf für meine Gopro einen geeigneten Kopter zu bauen. Seitdem habe ich etliche Ideen und Entwürfe gezeichnet und auch wieder verworfen. Versuche mit einem Servogimbal waren unbefriedigend. Erst mit dem Alex Mos System hab ich zufriedenstellende Ergebnisse erzielt. Allerdings ist mein aktueller Kopter für einen sinnvollen Einsatz mit dem BL-Gimbal überlastet. Leistung und Flugzeit lassen zu wünschen übrig. Daraus ergab sich ein klares Lastenheft für meine neue Konstruktion:
Flugzeit bei entsprechender Nutzlast, Videobild ohne störende Propeller
Allerdings konnte ich mich nicht mit den hochbeinigen Varianten anfreunden. Deshalb hab ich die Variante ähnlich Discovery gewählt. Wenn man es so will – ein weiterer Clon.

Ausführungsdetails:
Ardupilot Mega 2.5+
Spektrum Empfänger
4S Lipo 3250 mAh
4x NTM 2830 750 kv
4x DIJ ESC 20A – mit SimonK
4x CfK Prop 10x4,5 v. flyduino
Ausleger Alu 11,5x11,5
Basisplatten Cfk 1,5 mm
Landegestell im Vakuum laminiert
Da der Kopter komplett im 3D CAD konstruiert wurde läßt sich das Fluggewicht und die Einhaltung des Schwerpunkts vorbestimmen. Da die Flugzeit neben der Effizient der Antriebskomponenten maßgeblich durch das Fluggewicht beeinflußt wird, hab ich hier besonderen Augenmerk drauf gelegt.
Laut CAD wiegt der Kopter flugfertig ca. 1300g (+/-) – wie ich denke ein respektabler Wert.
Video- und FPV-Funktionen sollen einfach montierbar sein. So läßt sich der Kopter vom reinen Fluggerät bis hin zum Video-FPV Kopter einsetzen. Eine variable Akkubefestigung korrigiert hierbei den Schwerpunkt.
Wenn er gut fliegt und meine Erwartungen erfüllt werde ich noch eine Haube dazu machen
Der Stand der Dinge:
Wie ihr seht ist Konstruktion bereist weitestgehend fertig und heute habe ich die letzten Teile gedreht und gefräst. Ab morgen beginnt die Montage.

Konstruktive Kritik und Anregungen sind jederzeit willkommen...
Heute hab ich begonne die Ausleger vorzubereiten. Zuerst muss da etwas Farbe dran. Am besten hat sich d-c-fix bewärt. Es gibbei uns im Baumarkt sogar schwarz-seidenmatt - sieht schick aus wie ich finde. Vorne brauch ich einfach etwas Farbe - da musste mein Standard-gelb wieder herhalten.

Als nächstes die Motoren. Die Fertigungsqualität der Motoren ist auf den ersten Blick überraschend gut. Allerdings ist es in meinem Einsatzfall notwendig den Motor umzubauen. Die Motorwelle muss auf die andere Seite. Das macht es notwendig einen Einstich und zwei neue Klemmflächen auf der Motorwelle aufzubringen. Allerdings ist die ziemlich hart.
Erst mnit einem selbst geschliffenen Hartmetallstichel hab ich den Einstich in Form gebracht.
Hier sollte man - falls keine geeigneten Werkzeuge und Maschinen vorhanden die Finger weg lassen. Mit dem Dremel und einer Trennscheibe läßt sich keine saubere Anlageschulter für den Sicherungsring herstellen - das wird wenn dann eher ein Radius. Fragwürdig ob der Sicherungsring dann hält. Die Folgen kann sich jeder selbst ausmalen.
Wichtig den Sicherungs auf einem Ölstein abziehen, so dass er sauber an der Schulter anliegt

Was mich überrascht hat war der gute Rundlauf und eine geringe Unwucht. Der Rundlauf liegt zwischen 0,02 und 0,04 mm.


Der einzige Nachteil bei den Motoren ist die Klemmung der Glocke auf der Motorwelle. Durch den radialen Druck beim festziehen des Gewindestifts verbiegt sich die Glocke so stark, dass der Rundlauf an der Welle bis zu 0,2 mm beträgt - also das 10-fache.
Deshalb hab ich auch keinen Mitnehmerflansch verwendet. den einen, den ich gedreht hatte kam daher wie ein Kuhschwanz.

So, das wars für heute - morgen gehts ans Verkabeln und Vormontieren der Ausleger.
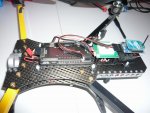
Neuer Stand - die Ausleger sind montiert und zur Verkabelung der ESC der Kopter grob vormontiert. Im hinteren Bereich geht es ganz schön eng zu. 11,5 mm Höhe sind nicht gerade viel für ESC´s und Kabel. Die ESC sind direkt mit den Motoren verlötet - im Verlauf immer wieder Test - stimmt die Drehrichtung und funktioniert noch alles.

Als nächstes kommt die Stromversorgung, dann hoffe ich mal das dickste hinter mir zu haben.
.....
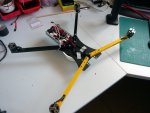
Ein langer Tag geht zu Ende... der Deckel ist drauf und der Kopter steht auf den eigenen Beinen... hier mal ein paar Impressionen...




mit Gimbal...

und die variable Akkubefestigung - mit Gimbal wird der Akku um 65 mm nach hinten versetzt. Ein Lochbild im Akkurahmnen ermöglicht noch leichte Korrekturen nach vorne oder hinten...

Habe fertig....
die Grundausführung ist mal fertig. Der Code ist aufgespielt und alle Grundeinstellungen abgeschlossen... jetzt gehts zum Erstflug und PID-Einstellungen.
Gewichtsbilanz:
Grundmodell ohne Akku - 804g
mit Akku - 1100g
mit Gimbal und Gopro 3 - 1400g



Grüße
Knut
trendgerecht möchte ich euch in diesem Baubericht euch meine Variante eines Videokopters präsentieren.
Seit Beginn diesen Jahres spukt mir der Gedanke durch den Kopf für meine Gopro einen geeigneten Kopter zu bauen. Seitdem habe ich etliche Ideen und Entwürfe gezeichnet und auch wieder verworfen. Versuche mit einem Servogimbal waren unbefriedigend. Erst mit dem Alex Mos System hab ich zufriedenstellende Ergebnisse erzielt. Allerdings ist mein aktueller Kopter für einen sinnvollen Einsatz mit dem BL-Gimbal überlastet. Leistung und Flugzeit lassen zu wünschen übrig. Daraus ergab sich ein klares Lastenheft für meine neue Konstruktion:
Flugzeit bei entsprechender Nutzlast, Videobild ohne störende Propeller
Allerdings konnte ich mich nicht mit den hochbeinigen Varianten anfreunden. Deshalb hab ich die Variante ähnlich Discovery gewählt. Wenn man es so will – ein weiterer Clon.
Ausführungsdetails:
Ardupilot Mega 2.5+
Spektrum Empfänger
4S Lipo 3250 mAh
4x NTM 2830 750 kv
4x DIJ ESC 20A – mit SimonK
4x CfK Prop 10x4,5 v. flyduino
Ausleger Alu 11,5x11,5
Basisplatten Cfk 1,5 mm
Landegestell im Vakuum laminiert
Da der Kopter komplett im 3D CAD konstruiert wurde läßt sich das Fluggewicht und die Einhaltung des Schwerpunkts vorbestimmen. Da die Flugzeit neben der Effizient der Antriebskomponenten maßgeblich durch das Fluggewicht beeinflußt wird, hab ich hier besonderen Augenmerk drauf gelegt.
Laut CAD wiegt der Kopter flugfertig ca. 1300g (+/-) – wie ich denke ein respektabler Wert.
Video- und FPV-Funktionen sollen einfach montierbar sein. So läßt sich der Kopter vom reinen Fluggerät bis hin zum Video-FPV Kopter einsetzen. Eine variable Akkubefestigung korrigiert hierbei den Schwerpunkt.
Wenn er gut fliegt und meine Erwartungen erfüllt werde ich noch eine Haube dazu machen
Der Stand der Dinge:
Wie ihr seht ist Konstruktion bereist weitestgehend fertig und heute habe ich die letzten Teile gedreht und gefräst. Ab morgen beginnt die Montage.
Konstruktive Kritik und Anregungen sind jederzeit willkommen...
Heute hab ich begonne die Ausleger vorzubereiten. Zuerst muss da etwas Farbe dran. Am besten hat sich d-c-fix bewärt. Es gibbei uns im Baumarkt sogar schwarz-seidenmatt - sieht schick aus wie ich finde. Vorne brauch ich einfach etwas Farbe - da musste mein Standard-gelb wieder herhalten.
Als nächstes die Motoren. Die Fertigungsqualität der Motoren ist auf den ersten Blick überraschend gut. Allerdings ist es in meinem Einsatzfall notwendig den Motor umzubauen. Die Motorwelle muss auf die andere Seite. Das macht es notwendig einen Einstich und zwei neue Klemmflächen auf der Motorwelle aufzubringen. Allerdings ist die ziemlich hart.
Erst mnit einem selbst geschliffenen Hartmetallstichel hab ich den Einstich in Form gebracht.
Hier sollte man - falls keine geeigneten Werkzeuge und Maschinen vorhanden die Finger weg lassen. Mit dem Dremel und einer Trennscheibe läßt sich keine saubere Anlageschulter für den Sicherungsring herstellen - das wird wenn dann eher ein Radius. Fragwürdig ob der Sicherungsring dann hält. Die Folgen kann sich jeder selbst ausmalen.
Wichtig den Sicherungs auf einem Ölstein abziehen, so dass er sauber an der Schulter anliegt
Was mich überrascht hat war der gute Rundlauf und eine geringe Unwucht. Der Rundlauf liegt zwischen 0,02 und 0,04 mm.
Der einzige Nachteil bei den Motoren ist die Klemmung der Glocke auf der Motorwelle. Durch den radialen Druck beim festziehen des Gewindestifts verbiegt sich die Glocke so stark, dass der Rundlauf an der Welle bis zu 0,2 mm beträgt - also das 10-fache.
Deshalb hab ich auch keinen Mitnehmerflansch verwendet. den einen, den ich gedreht hatte kam daher wie ein Kuhschwanz.
So, das wars für heute - morgen gehts ans Verkabeln und Vormontieren der Ausleger.
Neuer Stand - die Ausleger sind montiert und zur Verkabelung der ESC der Kopter grob vormontiert. Im hinteren Bereich geht es ganz schön eng zu. 11,5 mm Höhe sind nicht gerade viel für ESC´s und Kabel. Die ESC sind direkt mit den Motoren verlötet - im Verlauf immer wieder Test - stimmt die Drehrichtung und funktioniert noch alles.
Als nächstes kommt die Stromversorgung, dann hoffe ich mal das dickste hinter mir zu haben.
.....
Ein langer Tag geht zu Ende... der Deckel ist drauf und der Kopter steht auf den eigenen Beinen... hier mal ein paar Impressionen...
mit Gimbal...
und die variable Akkubefestigung - mit Gimbal wird der Akku um 65 mm nach hinten versetzt. Ein Lochbild im Akkurahmnen ermöglicht noch leichte Korrekturen nach vorne oder hinten...
Habe fertig....
die Grundausführung ist mal fertig. Der Code ist aufgespielt und alle Grundeinstellungen abgeschlossen... jetzt gehts zum Erstflug und PID-Einstellungen.
Gewichtsbilanz:
Grundmodell ohne Akku - 804g
mit Akku - 1100g
mit Gimbal und Gopro 3 - 1400g
Grüße
Knut
Zuletzt bearbeitet:
") .
.



