
Quanum NOVA / Cheerson CX-20 > PIXHAWK HowTo : Dein erster Arducopter, der fliegt ?
Quanum NOVA Umbau mit PX4LITE Flight Controller / GNSS mit NEO M8N / DJI E300
Wenn man einen Cheerson CX-20 oder Quanum NOVA besitzt (und benutzt), wird relativ schnell klar, dass dieser, so wie er ist, recht beschränkte Möglichkeiten hat. Das liegt primär daran, dass dessen Flight Controller eine abgespeckte Version der APM FC ist, die zudem eine spezielle Variante der ausgelaufenen Arducopter FW benötigt. Da liegt es nahe, dieses APM Derivat gegen eine aktuelle PIXHAWK Variante auszutauschen, vorzugsweise gegen eine kleine Bauform.
Nachfolgend ist beschrieben, wie man das macht, von geübten Bastlern in 60-90 Minuten zu realisieren:

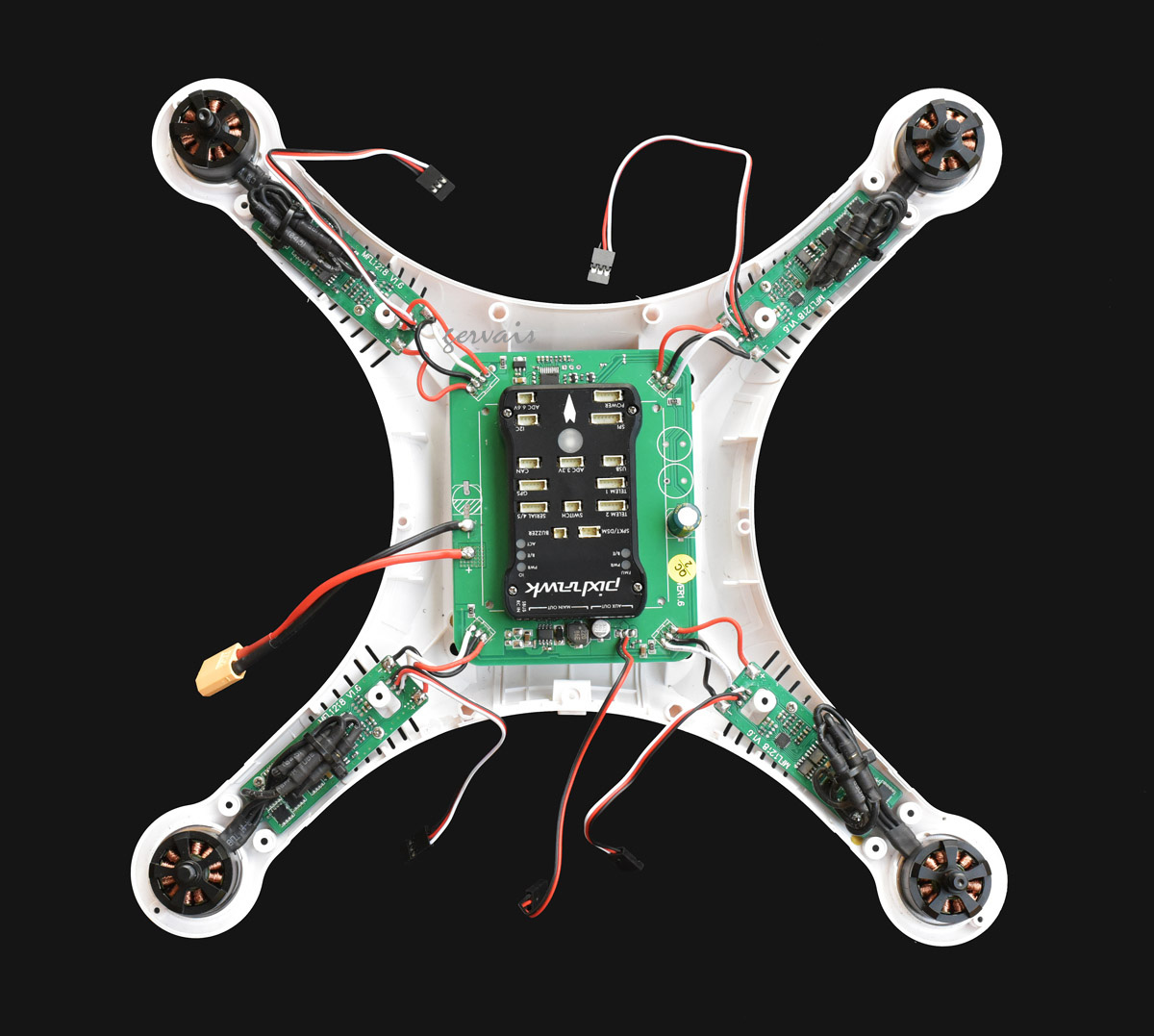
Hier sieht man ein bereits umgebaute Exemplar mit großem GNSS. Bilder des Originals kann man bei einem der Don´t let the price fool you Kistenschieber betrachten. Blumige Texte mit hohem Unterhaltungswert und Käuferbewertungen von Ahnungslosen die darauf hereingefallen sind, gratis dazu.
Schlachtfest :
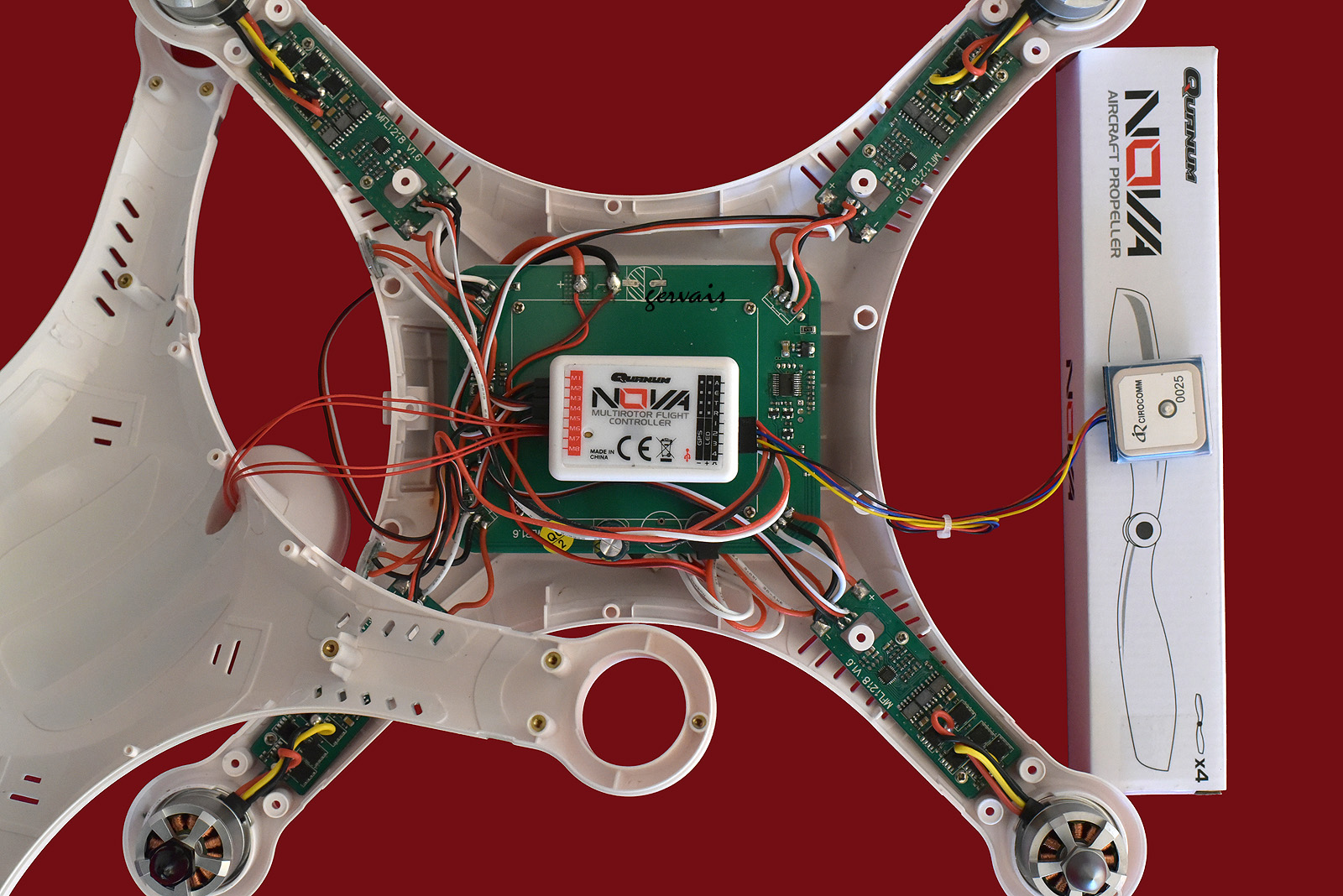
So definiert ein Kistenschieber PNF (Plug and Fly). Auch das GPS fliegt lose im Copter herum. Das macht aber nichts, denn man verwendet dieses minderwertige Erzeugnis asiatischer Sparkünstler ohnehin nicht mehr. Da es aber selbst dafür Freunde in der Bucht gibt, nicht gleich dort deponieren, wo es eigentlich hingehört. Die viel zu steifen Dämpferpads sollte man auf jeden Fall entsorgen, denn diese sind für jeden APM/PX ungeeignet. Die Status LED werden nebst losen Kabeln entfernt, man behält aber die mit Heisskleber fixierten Kappen. Die zur Quanum FC gehörenden Kabel lässt man besser gesteckt, das erleichtert dem neuen Besitzer die Zuordnung.
Vom Eise befreit. Zusätzlich sollte man den magnetischen Buzzer entfernen. Dieser terrorisiert im Original hilflose NOVA Besitzer, da er weder abschaltbar ist, noch einstellbar daran erinnert, dass die Batteriespannung auf ca.10.5V - 10.7V abgesunken ist. Auch quäkt er, wenn der NOVA / CX-20 ohne Batterie am USB Port angeschlossen wurde. So etwas braucht man nicht, denn der Pixhawk kommt mit einem konfigurierbaren Sound der verschiedene Statusmeldungen z.T. gar melodiös vorträgt. Die Elektronik des Batteriewarners selbst bleibt aber aktiv, denn sie steuert auch die LED der ESC, welche blinkend anzeigen, wenn man in Kürze landen sollte.
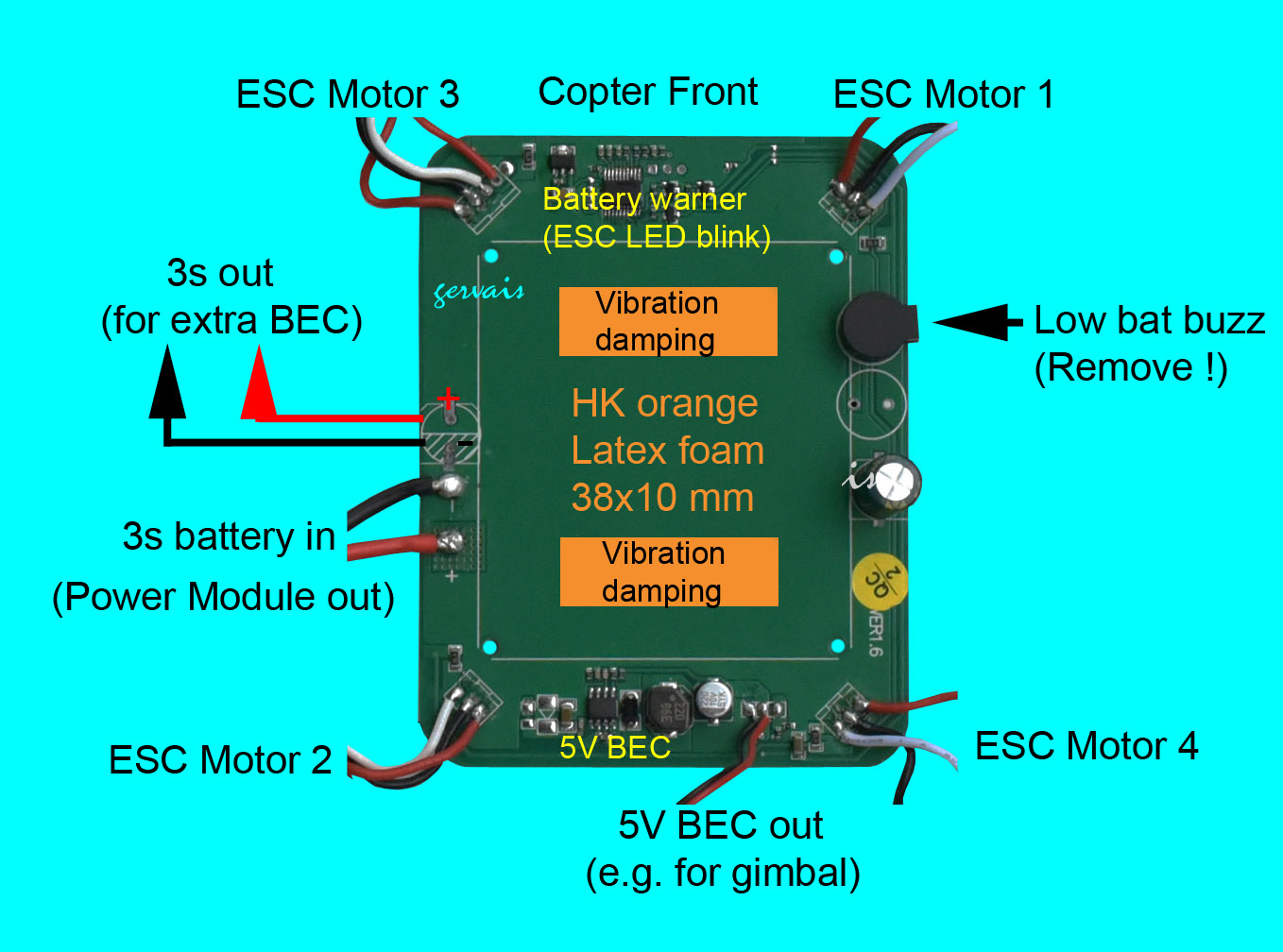
Das Kabel des 5V BEC auf dem Mainboard entfernt man nicht . Auch wenn man das BEC (nach dem Betrachten einiger frittierter Exemplare auf RCG) nicht mehr für die Versorgung des PX verwenden möchte, bietet es sich für eine separate Gimbal Controller Versorgung an und wird nach unten herausgeführt. Da ist es egal, ob es ausfällt. Den PX versorgen wir über ein Low Noise 5V BEC (z.B. Turnigy 3/5A) oder aber über ein gutes Powermodul, welches neben dem Batteriefach platziert wird.
Dann bringt man HK Orange Latex Streifen an, welche den den Flight Controller wirksam von Vibrationen entkoppeln, ein Muß für den PX4LITE und andere Arducopter FC.

Wenn man das Mainboard ohnehin abgeschraubt hat, empfiehlt es sich, dieses mit Unterlegscheiben (Hier Adapter aus einem Prop Set) und längeren Schrauben zu erhöhen, um das Batteriefach zu vergrößern. Auch wenn das NOVA / CX-20 Gehäuse von schlechterer Qualität als ein Phantom Gehäuse ist, sein Batteriefach ist größer und die Klappe schließt besser. Man sollte die Verstärkungen seitlich und unten aber nicht entfernen, das Gehäuse ist weich genug und eine Multistar 3s/4000mAh passt bereits mit der oben beschriebenen Maßnahme. Freilich eine Batterie für gemütliche Flieger, sportliche werden eher eine höherwertige 25-30c 2700mAh Variante wählen.
Flight Controller und Anschlüsse:
Selbst ein 3DR PIXHAWK würde passen, aber wer braucht schon dessen Anschlussvielfalt oder hakelige DF13 Anschlüsse im NOVA / CX-20. Eine kleinere PIXHAWK Variante vom Aliexpress Kistenschieber, wie der hier gezeigte PX4LITE, tut es auch.
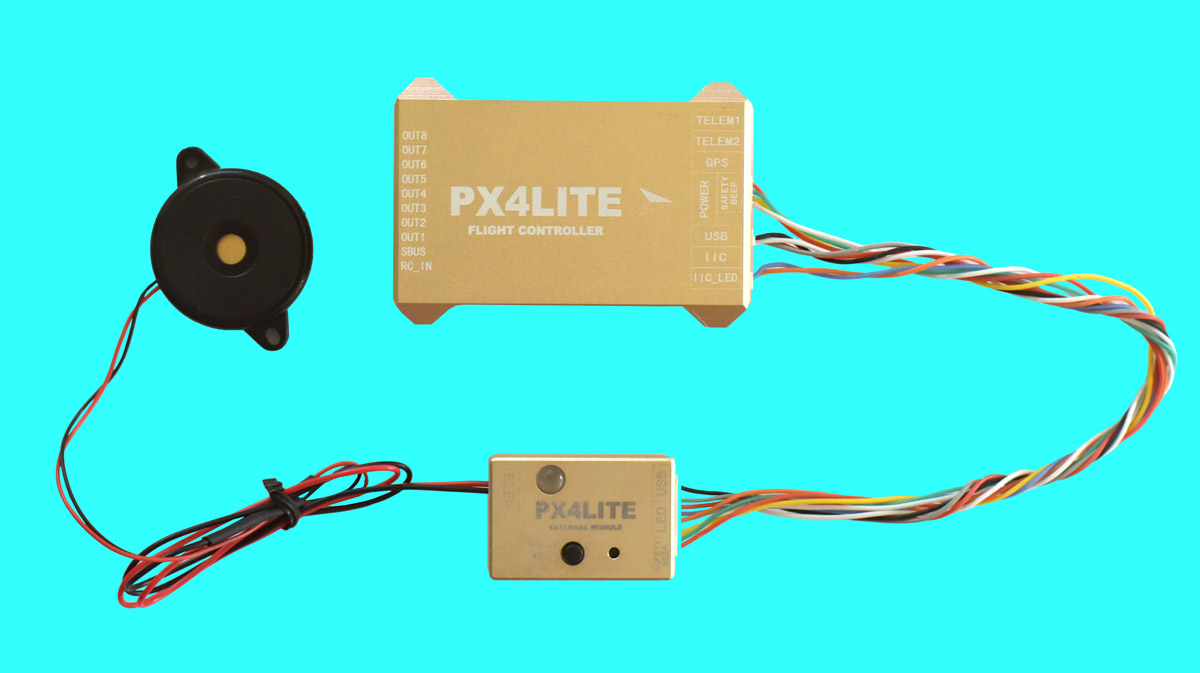
Das kleine Überraschungspaket kommt in einem gut verarbeiteten Aluminiumgehäuse mit interner, sep. IMU Einheit die in Schaumstoff gebettet gegen Vibrationen gefeit sein sollte. Ist sie aber nicht wirklich, im NOVA / CX-20 ist zusätzlich HK Orange Latex Pflicht. Diese Combo liefert dafür aber lt. AC Vibe Log rekordverdächtig gute Ergebnisse ab, wie sie selbst mit 3DR PIXHAWK und 3DR Foam nicht zu erzielen sind.

http://fs5.directupload.net/images/151229/epjznaza.jpg
Man wundert sich, wie viele Komponenten man weglassen kann, aber die Lötstellen der verbliebenen wirken erstaunlich perfekt. Man sieht auch den angesprochenen Schaumstoff, der die IMU mit Gegengewicht weich bettet. An sich ist das eine gute Idee, leider nicht gut genug umgesetzt. DJI kann das besser.
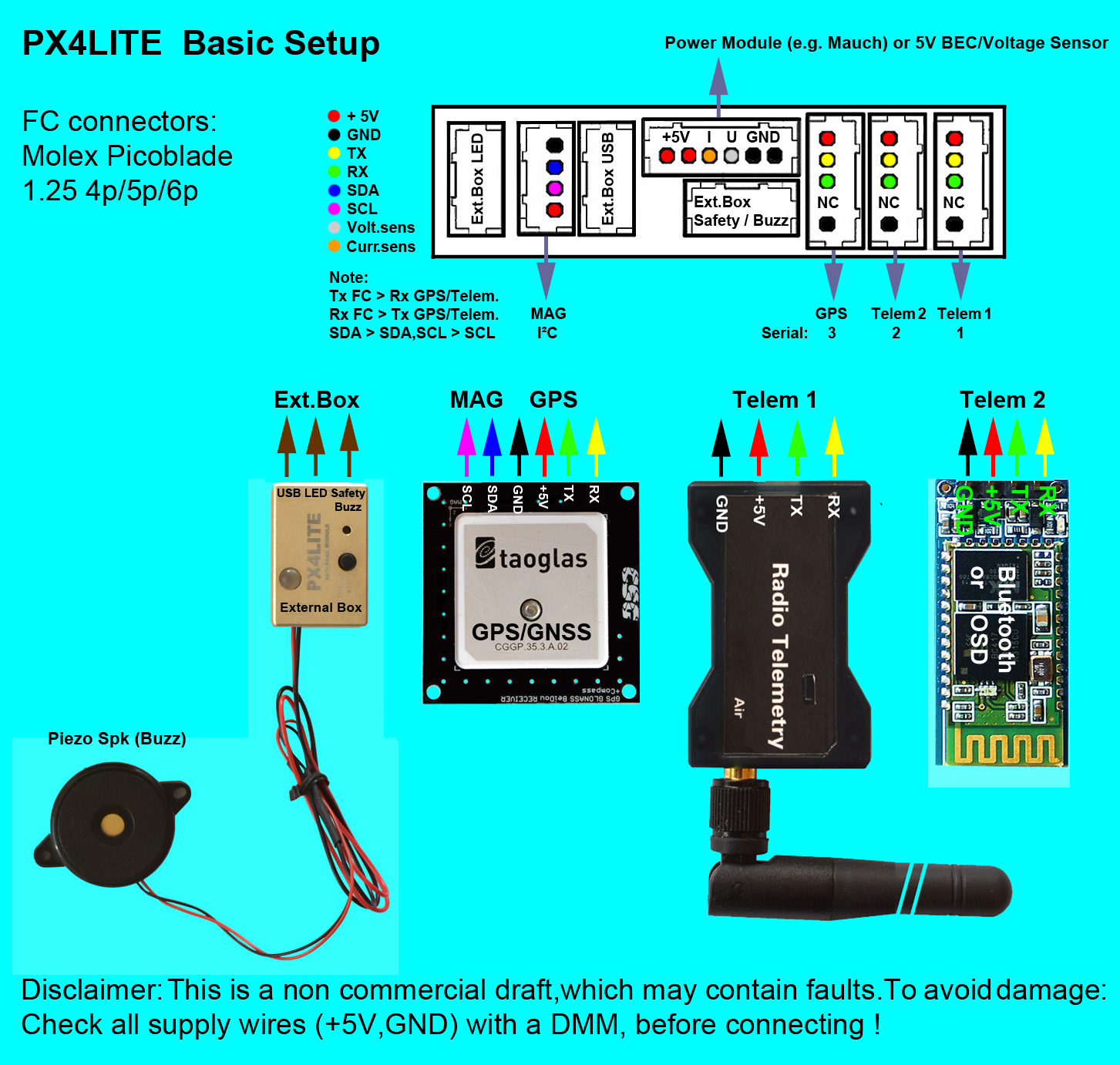
Im Vergleich mit einem Fullsize PIXHAWK fehlen einige Ports wie AUX, CAN, SPKT, SER4+5(Debug), aber NOVA / CX-20 Piloten werden mit den verbleibenden auskommen und sich darüber freuen, dass man Safety Switch, LED(I²C), USB und Piezo Anschluß in eine externe kompakte Alubox integriert hat. Das erspart eine konfuse externe Verdrahtung. Die PX4LITE Anschlüsse (Molex Picoblade 4,5p) sind logisch angeordnet und bereiten auch Ungeübten kein Kopfzerbrechen. Guter Eindruck. Ein XRacer hätte der F&E Seele mehr Spaß gemacht gemacht, aber dessen Beta stand dem Spezialisten fürs Generelle nicht zur Verfügung.
Power Module / BEC
Da man mit Arducopter Telemetrie nützt, zur Einrichtung, Kalibrierung oder für den Flug nach Wegepunkten, bietet es sich an, einen Sensor zu installieren, der die Überwachung der Batteriespannung auf dem Tablet ermöglicht. Da der NOVA / CX-20 so etwas nicht bietet, bauen Sparfüchse so etwas selber.
Die 50cts Schaltung ist dem 3DR Original nachempfunden, mit 5% Widerständen nicht besonders genau, aber brauchbar.
Wer aber auf der sicheren Seite sein will, Kalibrierung scheut, und auch die Stromaufnahme erfassen will, wird eins der neuen Mauch Hall Sensor Powermodule installieren, welches zudem auch noch das ohnehin zwingende Low Noise BEC für die Versorgung des PX4LITE bietet.
Die 100A Version des Hall Sensors ist für den NOVA / CX-20 völlig ausreichend. Anmerkung: Obwohl das bereits hier vorgestellte Modul /BEC auch für 6S Batterien geeignet ist, kann man für den NOVA / CX-20 noch nicht einmal 4s Batterien verwenden. Die verbliebenen NOVA / CX-20 Komponenten (u.A. ESC) sind mit 16V Elkos ausgestattet, die sicherheitshalber nur mit 3s verwendet werden sollten. Verbaut man andere ESC, verzichtet auf die LED der Arme, auf das Onboard BEC und den Spannungswarner, geht freilich auch mehr.
Nachdem der PX4LITE mit sehr gutem Teppichklebeband oder noch besser 3M Tape auf die Latex Streifen geklebt wurde, steckt man die Anschlüsse, wie zuvor beschrieben.
Auch wenn es nicht gut aussieht, die Kabel müssen im Bereich des PX4LITE lose sein. Der Freigang ist erforderlich, um die Vibrationsdämpfung nicht zu behindern oder gar asymetrisch zu verändern. Die Folge wäre ein schlechteres Verhalten in den Althold Modi.
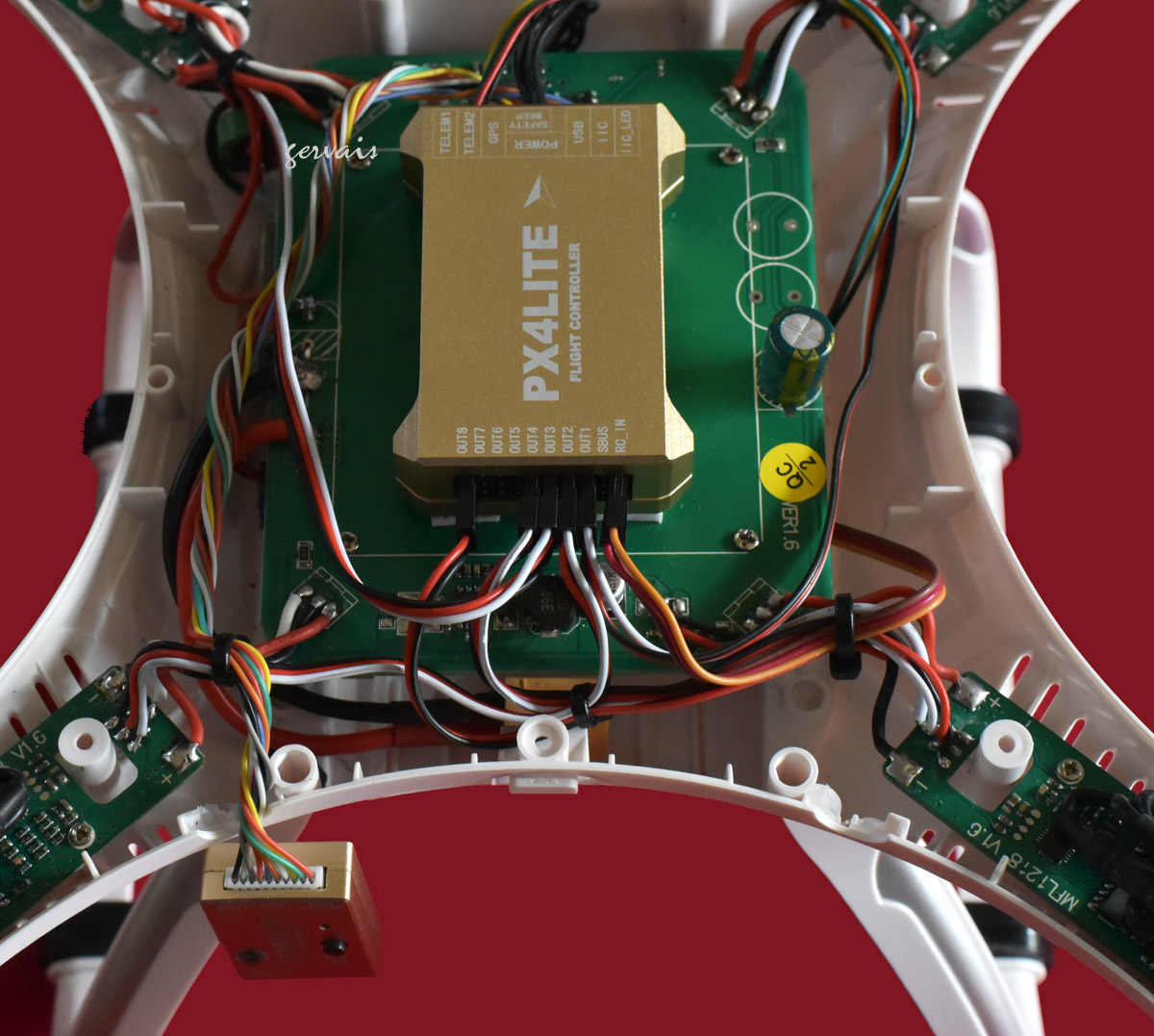
Rückwärtig wird der Empfänger (PPM oder SBUS) an den RC_IN Port angeschlossen. Bei der Montage der ESC (Falls mit BEC wird die rote Leitung nicht verwendet) ist die Reihenfolge gemäß X Quad Anordnung (siehe Arducopter Wiki oder Mainboard Bild) zu beachten. Die externe USB/LED Box kann man durch eins der ehemaligen Status LED Löcher führen oder aber unterseitig am NOVA / CX-20 anbringen, wo das Kabel durch den Schlitz des ehemaligen NOVA / CX-20 Extension Slot geführt wird.

Wenn alles zusammengesteckt ist, kann man erste Trockentests durchführen.
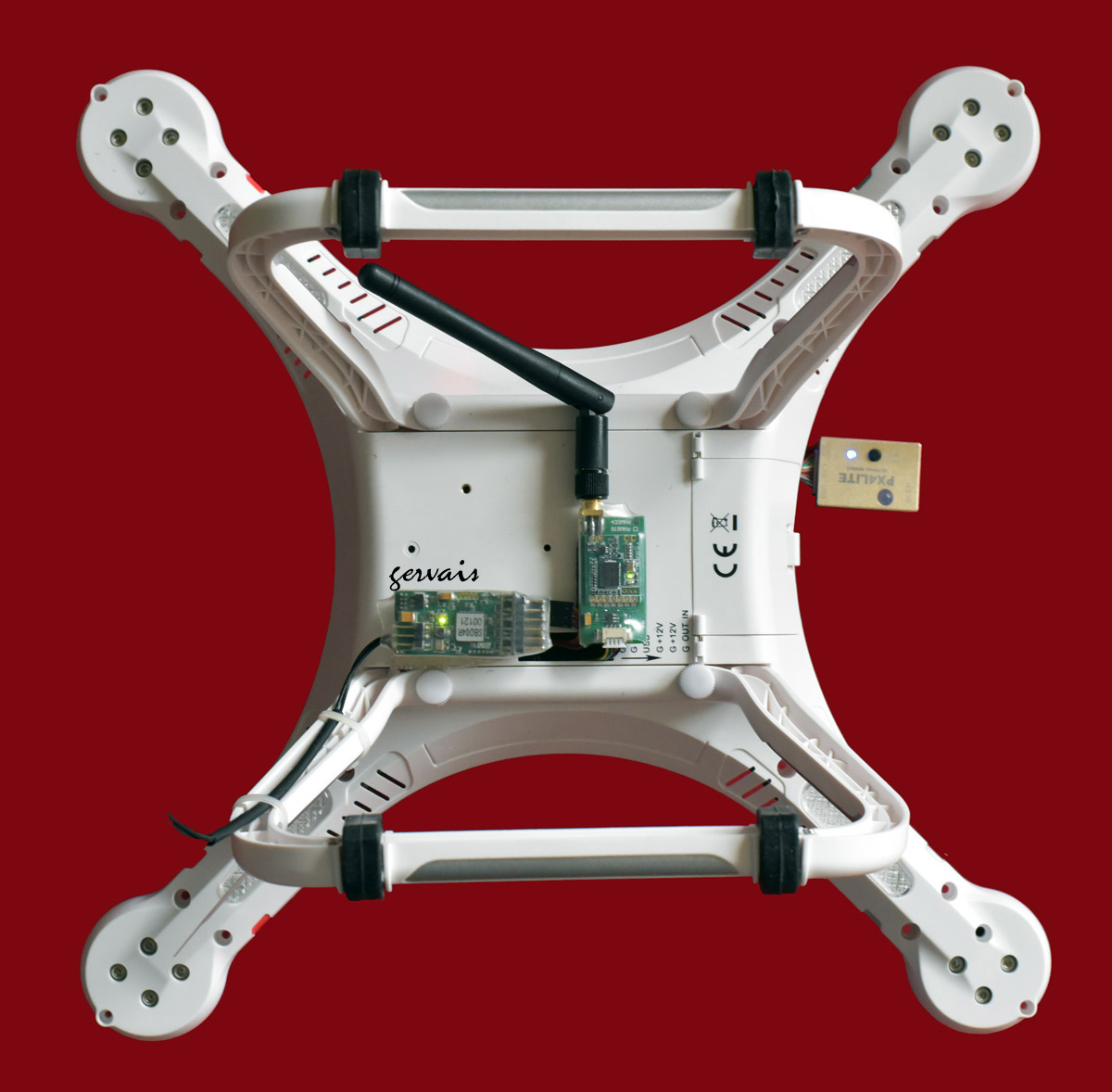
Unterseite: Hier würde man Rx und 3DR Radio montieren, will man diese auch für andere Copter verwenden. Aufschrauben ist lästig. Bei der Platzierung das Gimbal bzw. die GoPro Halterung nicht vergessen und die 5V Versorgung vom Mainboard BEC und/oder der Batterie durchführen.(Nicht abgebildet) Die offene NOVA / CX-20 Steckleiste ist hier entfernt, weil man sich damit schon mal gerne ver...steckt. Die Antennen können mit Kabelbindern an den Landebeinen befestigt werden. Eine V-Halterung (aus dem 250er Racer Sortiment) ist für einen Diversity Rx natürlich eher zu empfehlen, sieht auch besser aus.
ESC/Motoren
Es liegt natürlich nahe, auch die NOVA / CX-20 Motoren gleich gegen Pendants mit besseren Lagern zu tauschen: Die DJI E300 Motoren oder die aktuellen 2312E aus dem Phantom 3 oder dem E305 Set passen hervorragend, auch zu den verbauten NOVA / CX-20 ESC. Im Gegensatz zur Abbildung, ist es aber empfehlenswert, diese direkt zu verlöten. Zwar kann man dann die Drehrichtung CW/CCW nicht so leicht verändern, aber man erspart sich eine zusätzliche Fehlerquelle . Anmerkung: Belässt man die Original Motoren, sollte man ohnehin die Lötstellen kontrollieren, beim gezeigten Original waren diese z.T. kalt, mit schlechtem Lot (ohne Flussmittelzugabe?) sehr mangelhaft ausgeführt, was auch für die ESC Verbindungen gilt.
Die NOVA / CX-20 ESC (typ. Backorder oder zu teuer), kommen mit N-FET und einer SILABS MC (BLHeli fähig ?) und LED auf der Unterseite. Diese sind aber ausschließlich 3S tauglich und gut für hinreichende 15A. Man kann diese mit Phantom 1 ESC oder mit OPTO18A bzw. 420LITE ESC ersetzen (Alle 4 !). Dann muß man nicht mehr kalibrieren, verzichtet aber auf die LED und damit auf die visuelle Spannungswarnung. Dank Telemetrie ist das indes kein Thema mehr .
GPS / MAG (Compass)
Die PNF NOVA / CX-20 kommen zumeist mit einem losem Low Grade BeStar GPS. Um dieses weiter zu degradieren, ist es bei der RTF Version auf den Empfänger geklebt, z.T. von der Quanum FC verschattet und mitten im Störnebel der restlichen Komponenten. So ein Pfusch.

Wenigstens der separate MAG ist besser installiert, denn dieser sitzt auf dem NOVA / CX-20 in einem (etwas schwächlichem) Gehäuse, welches bei manchen Varianten eine GPS/MAG Combo aufnimmt. Dies ist allerdings mit magnetischen Schrauben befestigt, was die Offsets des z.T. schon schief eingeklebten MAG Sensors kräftig "verbiegt". Wer denkt sich so etwas aus ?
Man wird GPS und MAG aber ohnehin in die Bucht entsorgen und eine gute oder sehr gute GNSS MAG Combo mit NEO M8N Chipsatz verbauen. Da hat man die Wahl zwischen einer optisch sehr attraktiven Lösung im DJI NAZA Style (was allerdings mit einer empfangsschwachen 2mm Antenne bestraft wird) oder einer perfekten Lösung für die GPS Modi (Loiter, RTL, PosHold, Auto) mit großer Antenne, die aber teurer ist und noch etwas Bastelarbeit erfordert.
Ungeachtet der Wahl wird man aber die magnetischen Schrauben mit Plastik oder Alu Varianten ersetzen. Epoxy hilft auch.
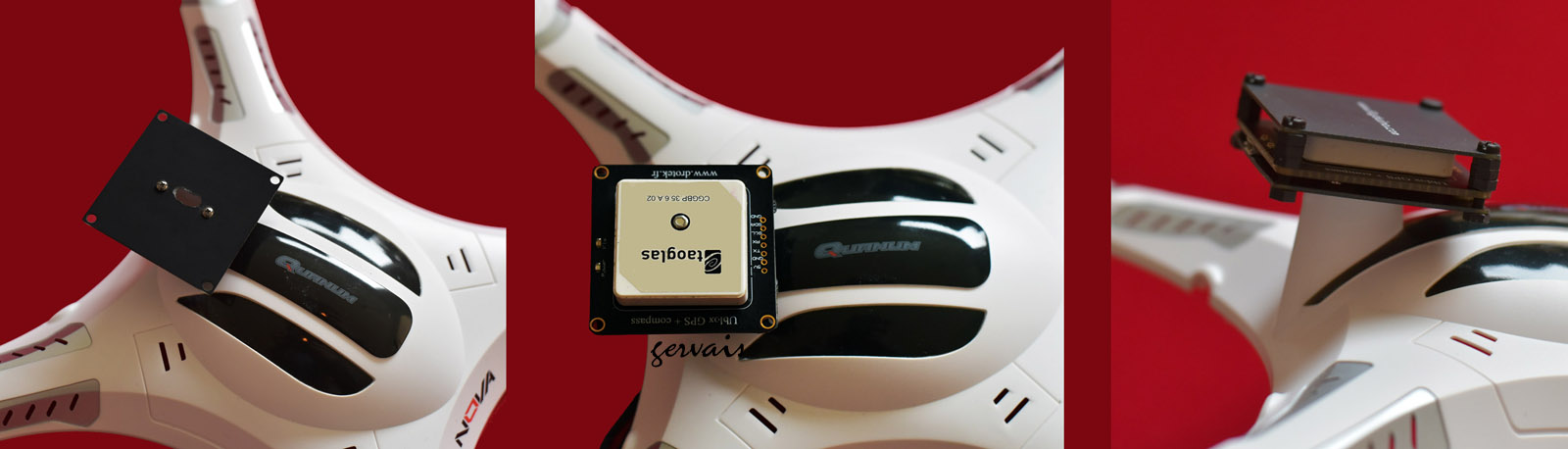
Mit der richtigen Entscheidung zugunsten der GPS Modi, z.B. für ein fantastisches CSG oder ein sehr gutes DroTek mit fetter 35x35mm Patch Antenne, wird man eine 50x50mm GFK Bodenplatte aus GFK installieren und eine darüber. Bei diesem NOVA / CX-20 wurde auch noch eine Kupferfolie (mit GND verbunden) auf die Bodenplatte geklebt, vermutlich nicht erforderlich bei neueren DroTek/CSG mit EMI Käfig um den U-Blox Chipsatz.

Wenn man die originale Optik beibehalten mag, nimmt das NOVA / CX-20 Gehäuse auch ein GNSS mit 25x25x4mm Patch auf, ein Kompromiss, der im Gegensatz zu seinen Pendants mit fetter Antenne zwar keine teilverschatteten Lufträume liebt, aber im Freien sehr gut funktioniert. Insbesondere dann, wenn man die man die Oberschale des NOVA / CX-20 innenseitig mit Alu oder noch besser Kupferfolie (an GND) auskleidet. Das GNSS sollte man mit Heisskleber fixieren und auf Schrauben verzichten.
Finale Tests
Bevor man das Gehäuse wieder zusammenfügt (21 Schrauben inklusive Landegestell) sollte man alles ausprobieren, auch die Motoren und deren Drehrichtung (Mission Planner Motortest)

Man sollte die Schrauben nicht überziehen und kein LocTite verwenden, weil dies Plastik angreift (Rissbildung), besser öfter kontrollieren. Und beim Zusammenfügen keins der dünnen Kabel einklemmen.
Mission Planner Settings /Calibration/Hinweise
Zunächst lädt man die neue FW (derzeit AC 3.3.2), da unsere chinesischen Freunde immer noch die alte 3.2.1 zum Testen installieren. PID (Auto) Tuning ist beim beschriebenen Aufbau zunächst nicht erforderlich, der PX NOVA / CX-20 fliegt bereits mit Default Werten hinreichend gut. Überraschend agil zudem.
Man wird CGS Failsafe deaktivieren.Gut für nichts. Geofence verschiebt man auf später. Ebenso Battery FS, denn es ist ohnehin keine gute Idee mit einem neuen Modell Flugzeitrekorde zu brechen. Wichtig ist RC FS. Aber auch diese Funktion sollte man vorerst auf Land stellen, bis sichergestellt ist, dass der NOVA / CX-20 auch in den GPS Modi sehr gut fliegt. RTL ist keine Option für Erstflüge !!!
Der MAG sollte sehr sorgfältig kalibriert werden, vorzugsweise entfernt von Metall, Lautsprechern oder Smartphones. Ist alles korrekt installiert, sieht man während der Kalibrierung zwei Kugeln, die sich füllen. Die gespeicherten Offsets werden erst nach dem Re-Boot aktiv.
Nach der kompletten ACC Calibration (welche keine Perfektion erfordert) stellt sich ein gerader Horizont ein und bis dahin vom Mission Planner verkündete BAD xxxx Botschaften werden verschwinden und später nur noch selten in der EKF Initialisierungsphase oder heftigen Transportbewegungen erscheinen.
Die ersten Starts sollten erst bei sehr gutem GPS Empfang (HDOP unter 1.2) erfolgen. Das kann anfänglich auch 5 Minuten dauern, abhängig auch vom GPS Wetter. Selbst wenn man die Pre-Arm Checks ausgeschaltet hat, kann der EKF am Start hindern. Vielleicht hat man den Copter in der Einschaltphase beim Verstauen der Batterie bewegt, während der Startsequenz des PX, oder ein Bit hängt...noch einmal anstecken, dann klappt es auch.
Wenn sich der NOVA / CX-20 weigert, in AltHold zu starten, zunächst im Stabilize Mode beginnen, denn man kann noch am Boden auf Alt umschalten.
Wichtig: Zunächst im freien Feld auf niedriger Höhe üben, keine Langstrecken oder Batterierekorde anstreben, kein RTL oder gar Missionen testen. Einfach zunächst einmal in Althold testen, wie der NOVA / CX-20 fliegt. Erfahrenere Piloten werden es auch im Stabilize Mode probieren. Zeigt die Telemetrie (z.B. DroidPlanner auf OTG Tablet) sehr guten GPS Empfang, kann man danach anfangen LOITER oder POSHOLD zu testen. Funktioniert das einwandfrei (und nur dann!), funktioniert auch RTL oder Auto.
Auf einmal macht der NOVA / CX-20 richtig Spaß, ein phantastischer Übungs- und Testcopter für kleines Geld, der sich auch sehr flott bewegen lässt. Agiler als sein Pendant mit NAZA.
Wenn man später Vertrauen hat, kann man die PID optimieren (z.B. mit Autotune) und mit dem EKF spielen.

Nach dem Flug schaut man sich die Logs an, perfekter GPS Empfang
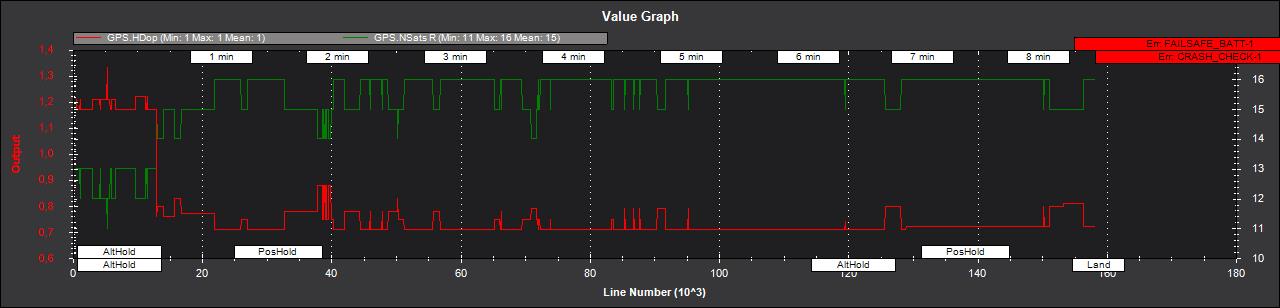
Das große CSG / DroTek wird HDOPs unter 1.0 und über 13 Sats zeigen,und das Vib Log...
Unglaublich niedrige Vibrationen.
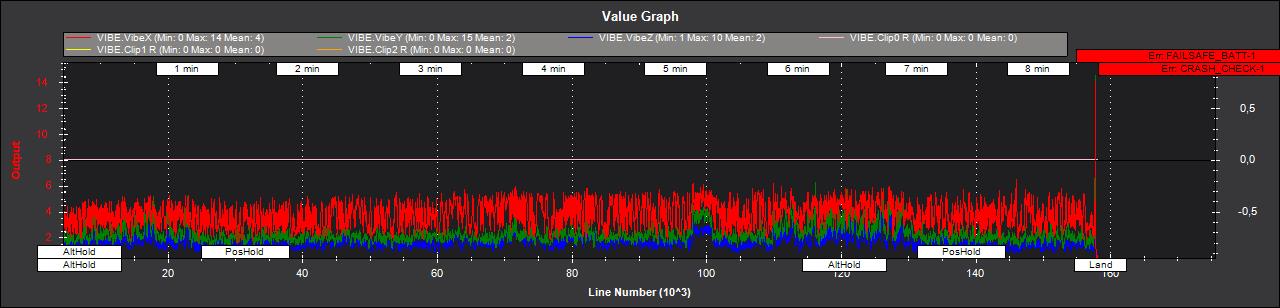
Wenn man sich an die Vorschläge hält, wird man mit einem perfekten Vibrationsniveau belohnt. Auto Analysis zeigt dann nan, selbst bei sehr sportlichem Flug, Werte unter 0,2. Vorausgesetzt man verwendet auch vibrationsarme Motoren i.V. mit originalen DJI 9450 Propellern (5-6€/Paar) und keine billigen Clone Props. Die DJI 8045 Kopien des NOVA / CX-20 wird man ohnehin nicht montieren, denn diese Schlabberlöffel verkürzten schon im Original die Flugzeit.
Perfektes Loiter !

Viel Spaß !
Anmerkungen: Sämtliche Bilder und Textauszüge dürfen für private Zwecke verwendet werden, indes weder gewerblich noch für Verkaufsanzeigen oder Auktionshäuser.
Quanum NOVA Umbau mit PX4LITE Flight Controller / GNSS mit NEO M8N / DJI E300
Wenn man einen Cheerson CX-20 oder Quanum NOVA besitzt (und benutzt), wird relativ schnell klar, dass dieser, so wie er ist, recht beschränkte Möglichkeiten hat. Das liegt primär daran, dass dessen Flight Controller eine abgespeckte Version der APM FC ist, die zudem eine spezielle Variante der ausgelaufenen Arducopter FW benötigt. Da liegt es nahe, dieses APM Derivat gegen eine aktuelle PIXHAWK Variante auszutauschen, vorzugsweise gegen eine kleine Bauform.
Nachfolgend ist beschrieben, wie man das macht, von geübten Bastlern in 60-90 Minuten zu realisieren:
Hier sieht man ein bereits umgebaute Exemplar mit großem GNSS. Bilder des Originals kann man bei einem der Don´t let the price fool you Kistenschieber betrachten. Blumige Texte mit hohem Unterhaltungswert und Käuferbewertungen von Ahnungslosen die darauf hereingefallen sind, gratis dazu.
Schlachtfest :
So definiert ein Kistenschieber PNF (Plug and Fly). Auch das GPS fliegt lose im Copter herum. Das macht aber nichts, denn man verwendet dieses minderwertige Erzeugnis asiatischer Sparkünstler ohnehin nicht mehr. Da es aber selbst dafür Freunde in der Bucht gibt, nicht gleich dort deponieren, wo es eigentlich hingehört. Die viel zu steifen Dämpferpads sollte man auf jeden Fall entsorgen, denn diese sind für jeden APM/PX ungeeignet. Die Status LED werden nebst losen Kabeln entfernt, man behält aber die mit Heisskleber fixierten Kappen. Die zur Quanum FC gehörenden Kabel lässt man besser gesteckt, das erleichtert dem neuen Besitzer die Zuordnung.
Vom Eise befreit. Zusätzlich sollte man den magnetischen Buzzer entfernen. Dieser terrorisiert im Original hilflose NOVA Besitzer, da er weder abschaltbar ist, noch einstellbar daran erinnert, dass die Batteriespannung auf ca.10.5V - 10.7V abgesunken ist. Auch quäkt er, wenn der NOVA / CX-20 ohne Batterie am USB Port angeschlossen wurde. So etwas braucht man nicht, denn der Pixhawk kommt mit einem konfigurierbaren Sound der verschiedene Statusmeldungen z.T. gar melodiös vorträgt. Die Elektronik des Batteriewarners selbst bleibt aber aktiv, denn sie steuert auch die LED der ESC, welche blinkend anzeigen, wenn man in Kürze landen sollte.
Das Kabel des 5V BEC auf dem Mainboard entfernt man nicht . Auch wenn man das BEC (nach dem Betrachten einiger frittierter Exemplare auf RCG) nicht mehr für die Versorgung des PX verwenden möchte, bietet es sich für eine separate Gimbal Controller Versorgung an und wird nach unten herausgeführt. Da ist es egal, ob es ausfällt. Den PX versorgen wir über ein Low Noise 5V BEC (z.B. Turnigy 3/5A) oder aber über ein gutes Powermodul, welches neben dem Batteriefach platziert wird.
Dann bringt man HK Orange Latex Streifen an, welche den den Flight Controller wirksam von Vibrationen entkoppeln, ein Muß für den PX4LITE und andere Arducopter FC.
Wenn man das Mainboard ohnehin abgeschraubt hat, empfiehlt es sich, dieses mit Unterlegscheiben (Hier Adapter aus einem Prop Set) und längeren Schrauben zu erhöhen, um das Batteriefach zu vergrößern. Auch wenn das NOVA / CX-20 Gehäuse von schlechterer Qualität als ein Phantom Gehäuse ist, sein Batteriefach ist größer und die Klappe schließt besser. Man sollte die Verstärkungen seitlich und unten aber nicht entfernen, das Gehäuse ist weich genug und eine Multistar 3s/4000mAh passt bereits mit der oben beschriebenen Maßnahme. Freilich eine Batterie für gemütliche Flieger, sportliche werden eher eine höherwertige 25-30c 2700mAh Variante wählen.
Flight Controller und Anschlüsse:
Selbst ein 3DR PIXHAWK würde passen, aber wer braucht schon dessen Anschlussvielfalt oder hakelige DF13 Anschlüsse im NOVA / CX-20. Eine kleinere PIXHAWK Variante vom Aliexpress Kistenschieber, wie der hier gezeigte PX4LITE, tut es auch.
Das kleine Überraschungspaket kommt in einem gut verarbeiteten Aluminiumgehäuse mit interner, sep. IMU Einheit die in Schaumstoff gebettet gegen Vibrationen gefeit sein sollte. Ist sie aber nicht wirklich, im NOVA / CX-20 ist zusätzlich HK Orange Latex Pflicht. Diese Combo liefert dafür aber lt. AC Vibe Log rekordverdächtig gute Ergebnisse ab, wie sie selbst mit 3DR PIXHAWK und 3DR Foam nicht zu erzielen sind.
http://fs5.directupload.net/images/151229/epjznaza.jpg
Man wundert sich, wie viele Komponenten man weglassen kann, aber die Lötstellen der verbliebenen wirken erstaunlich perfekt. Man sieht auch den angesprochenen Schaumstoff, der die IMU mit Gegengewicht weich bettet. An sich ist das eine gute Idee, leider nicht gut genug umgesetzt. DJI kann das besser.
Im Vergleich mit einem Fullsize PIXHAWK fehlen einige Ports wie AUX, CAN, SPKT, SER4+5(Debug), aber NOVA / CX-20 Piloten werden mit den verbleibenden auskommen und sich darüber freuen, dass man Safety Switch, LED(I²C), USB und Piezo Anschluß in eine externe kompakte Alubox integriert hat. Das erspart eine konfuse externe Verdrahtung. Die PX4LITE Anschlüsse (Molex Picoblade 4,5p) sind logisch angeordnet und bereiten auch Ungeübten kein Kopfzerbrechen. Guter Eindruck. Ein XRacer hätte der F&E Seele mehr Spaß gemacht gemacht, aber dessen Beta stand dem Spezialisten fürs Generelle nicht zur Verfügung.
Power Module / BEC
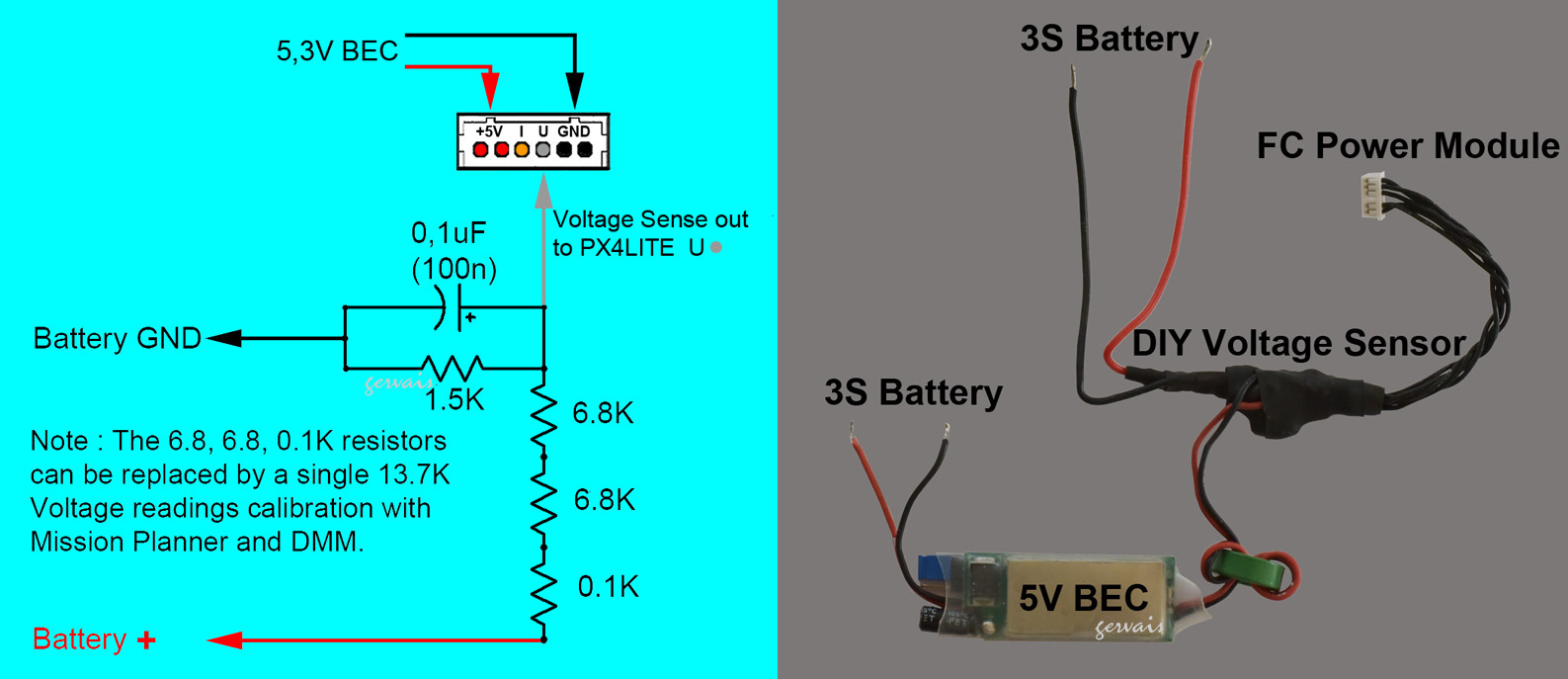
Da man mit Arducopter Telemetrie nützt, zur Einrichtung, Kalibrierung oder für den Flug nach Wegepunkten, bietet es sich an, einen Sensor zu installieren, der die Überwachung der Batteriespannung auf dem Tablet ermöglicht. Da der NOVA / CX-20 so etwas nicht bietet, bauen Sparfüchse so etwas selber.
Die 50cts Schaltung ist dem 3DR Original nachempfunden, mit 5% Widerständen nicht besonders genau, aber brauchbar.
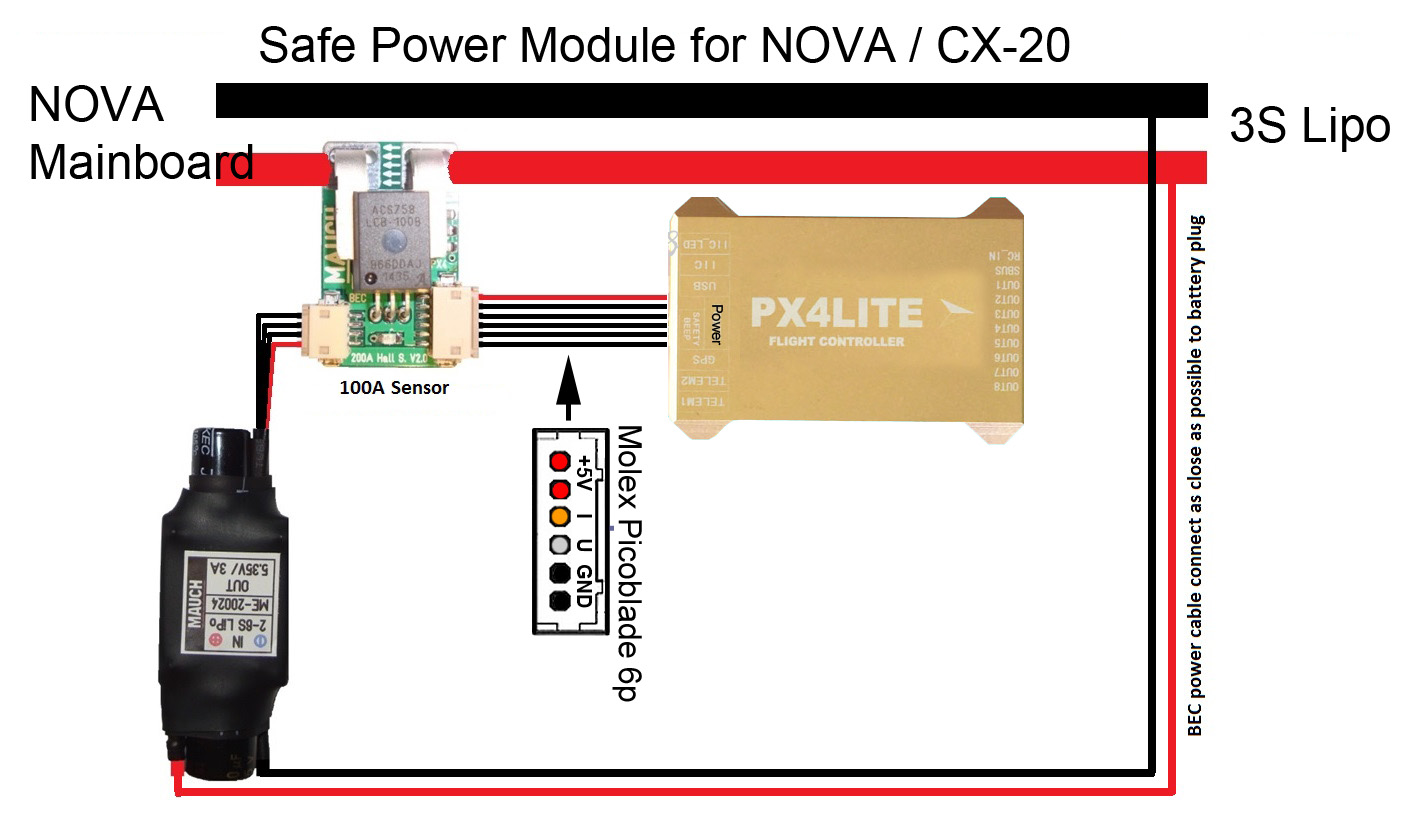
Wer aber auf der sicheren Seite sein will, Kalibrierung scheut, und auch die Stromaufnahme erfassen will, wird eins der neuen Mauch Hall Sensor Powermodule installieren, welches zudem auch noch das ohnehin zwingende Low Noise BEC für die Versorgung des PX4LITE bietet.
Die 100A Version des Hall Sensors ist für den NOVA / CX-20 völlig ausreichend. Anmerkung: Obwohl das bereits hier vorgestellte Modul /BEC auch für 6S Batterien geeignet ist, kann man für den NOVA / CX-20 noch nicht einmal 4s Batterien verwenden. Die verbliebenen NOVA / CX-20 Komponenten (u.A. ESC) sind mit 16V Elkos ausgestattet, die sicherheitshalber nur mit 3s verwendet werden sollten. Verbaut man andere ESC, verzichtet auf die LED der Arme, auf das Onboard BEC und den Spannungswarner, geht freilich auch mehr.
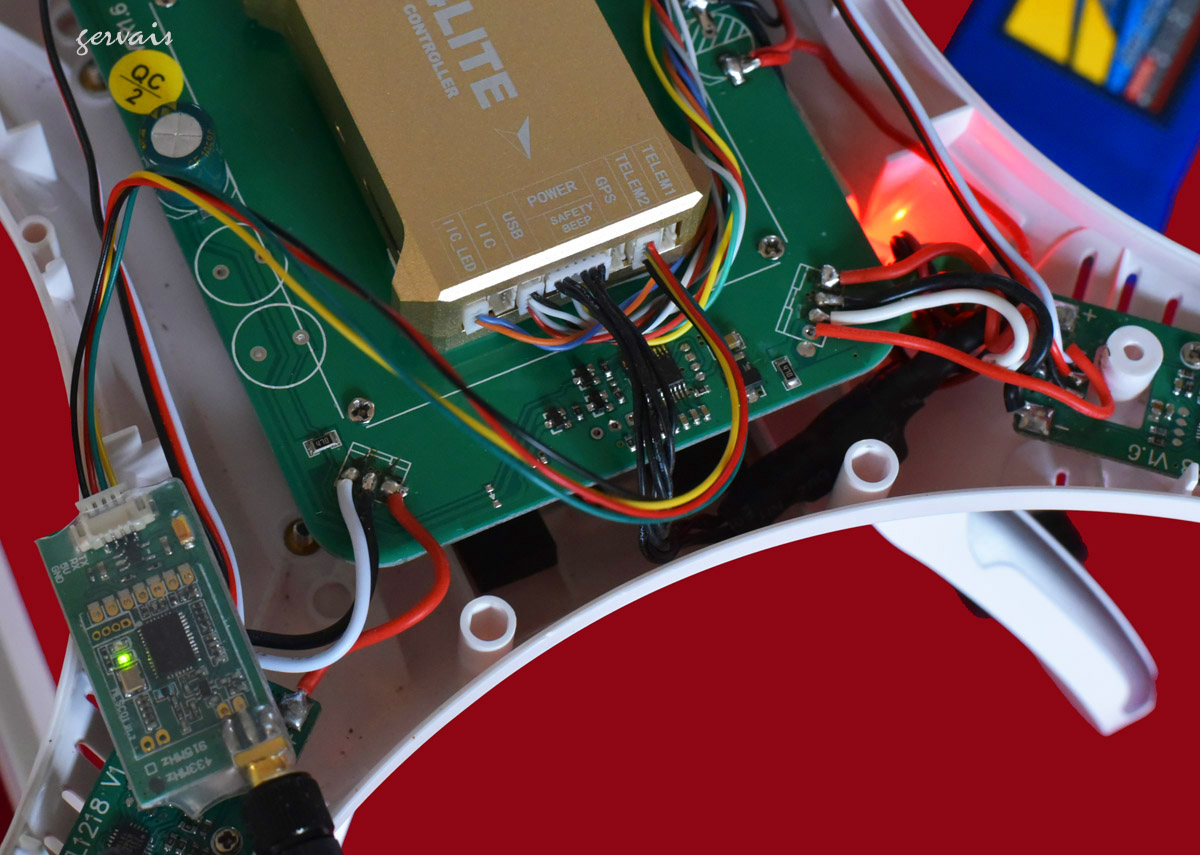
Nachdem der PX4LITE mit sehr gutem Teppichklebeband oder noch besser 3M Tape auf die Latex Streifen geklebt wurde, steckt man die Anschlüsse, wie zuvor beschrieben.
Auch wenn es nicht gut aussieht, die Kabel müssen im Bereich des PX4LITE lose sein. Der Freigang ist erforderlich, um die Vibrationsdämpfung nicht zu behindern oder gar asymetrisch zu verändern. Die Folge wäre ein schlechteres Verhalten in den Althold Modi.
Rückwärtig wird der Empfänger (PPM oder SBUS) an den RC_IN Port angeschlossen. Bei der Montage der ESC (Falls mit BEC wird die rote Leitung nicht verwendet) ist die Reihenfolge gemäß X Quad Anordnung (siehe Arducopter Wiki oder Mainboard Bild) zu beachten. Die externe USB/LED Box kann man durch eins der ehemaligen Status LED Löcher führen oder aber unterseitig am NOVA / CX-20 anbringen, wo das Kabel durch den Schlitz des ehemaligen NOVA / CX-20 Extension Slot geführt wird.
Wenn alles zusammengesteckt ist, kann man erste Trockentests durchführen.
Unterseite: Hier würde man Rx und 3DR Radio montieren, will man diese auch für andere Copter verwenden. Aufschrauben ist lästig. Bei der Platzierung das Gimbal bzw. die GoPro Halterung nicht vergessen und die 5V Versorgung vom Mainboard BEC und/oder der Batterie durchführen.(Nicht abgebildet) Die offene NOVA / CX-20 Steckleiste ist hier entfernt, weil man sich damit schon mal gerne ver...steckt. Die Antennen können mit Kabelbindern an den Landebeinen befestigt werden. Eine V-Halterung (aus dem 250er Racer Sortiment) ist für einen Diversity Rx natürlich eher zu empfehlen, sieht auch besser aus.
ESC/Motoren
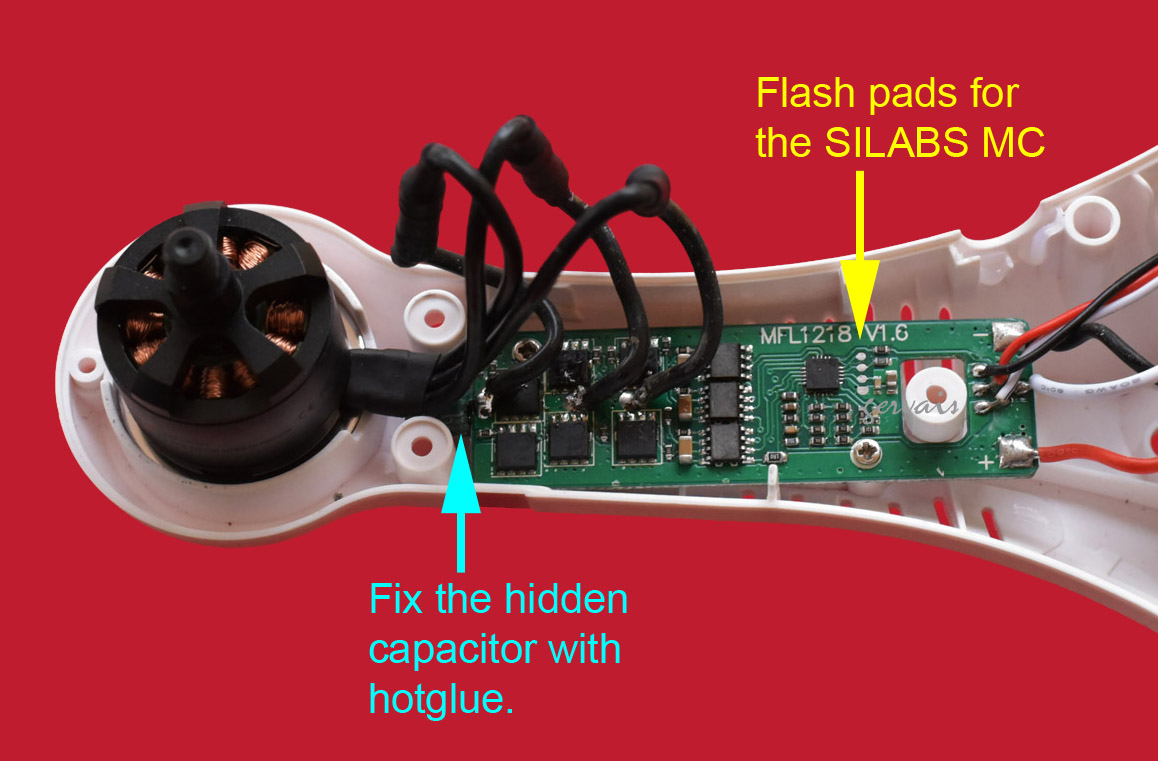
Es liegt natürlich nahe, auch die NOVA / CX-20 Motoren gleich gegen Pendants mit besseren Lagern zu tauschen: Die DJI E300 Motoren oder die aktuellen 2312E aus dem Phantom 3 oder dem E305 Set passen hervorragend, auch zu den verbauten NOVA / CX-20 ESC. Im Gegensatz zur Abbildung, ist es aber empfehlenswert, diese direkt zu verlöten. Zwar kann man dann die Drehrichtung CW/CCW nicht so leicht verändern, aber man erspart sich eine zusätzliche Fehlerquelle . Anmerkung: Belässt man die Original Motoren, sollte man ohnehin die Lötstellen kontrollieren, beim gezeigten Original waren diese z.T. kalt, mit schlechtem Lot (ohne Flussmittelzugabe?) sehr mangelhaft ausgeführt, was auch für die ESC Verbindungen gilt.
Die NOVA / CX-20 ESC (typ. Backorder oder zu teuer), kommen mit N-FET und einer SILABS MC (BLHeli fähig ?) und LED auf der Unterseite. Diese sind aber ausschließlich 3S tauglich und gut für hinreichende 15A. Man kann diese mit Phantom 1 ESC oder mit OPTO18A bzw. 420LITE ESC ersetzen (Alle 4 !). Dann muß man nicht mehr kalibrieren, verzichtet aber auf die LED und damit auf die visuelle Spannungswarnung. Dank Telemetrie ist das indes kein Thema mehr .
GPS / MAG (Compass)
Die PNF NOVA / CX-20 kommen zumeist mit einem losem Low Grade BeStar GPS. Um dieses weiter zu degradieren, ist es bei der RTF Version auf den Empfänger geklebt, z.T. von der Quanum FC verschattet und mitten im Störnebel der restlichen Komponenten. So ein Pfusch.
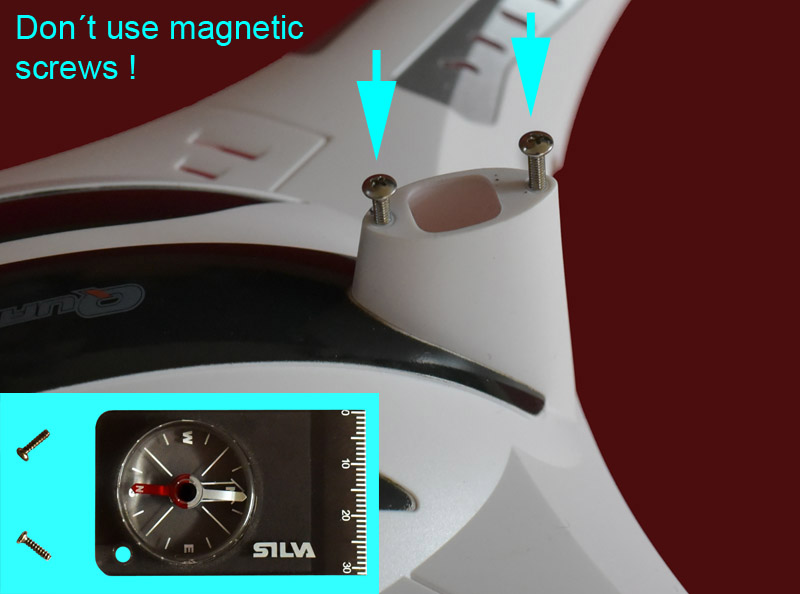
Wenigstens der separate MAG ist besser installiert, denn dieser sitzt auf dem NOVA / CX-20 in einem (etwas schwächlichem) Gehäuse, welches bei manchen Varianten eine GPS/MAG Combo aufnimmt. Dies ist allerdings mit magnetischen Schrauben befestigt, was die Offsets des z.T. schon schief eingeklebten MAG Sensors kräftig "verbiegt". Wer denkt sich so etwas aus ?
Man wird GPS und MAG aber ohnehin in die Bucht entsorgen und eine gute oder sehr gute GNSS MAG Combo mit NEO M8N Chipsatz verbauen. Da hat man die Wahl zwischen einer optisch sehr attraktiven Lösung im DJI NAZA Style (was allerdings mit einer empfangsschwachen 2mm Antenne bestraft wird) oder einer perfekten Lösung für die GPS Modi (Loiter, RTL, PosHold, Auto) mit großer Antenne, die aber teurer ist und noch etwas Bastelarbeit erfordert.
Ungeachtet der Wahl wird man aber die magnetischen Schrauben mit Plastik oder Alu Varianten ersetzen. Epoxy hilft auch.
Mit der richtigen Entscheidung zugunsten der GPS Modi, z.B. für ein fantastisches CSG oder ein sehr gutes DroTek mit fetter 35x35mm Patch Antenne, wird man eine 50x50mm GFK Bodenplatte aus GFK installieren und eine darüber. Bei diesem NOVA / CX-20 wurde auch noch eine Kupferfolie (mit GND verbunden) auf die Bodenplatte geklebt, vermutlich nicht erforderlich bei neueren DroTek/CSG mit EMI Käfig um den U-Blox Chipsatz.
Wenn man die originale Optik beibehalten mag, nimmt das NOVA / CX-20 Gehäuse auch ein GNSS mit 25x25x4mm Patch auf, ein Kompromiss, der im Gegensatz zu seinen Pendants mit fetter Antenne zwar keine teilverschatteten Lufträume liebt, aber im Freien sehr gut funktioniert. Insbesondere dann, wenn man die man die Oberschale des NOVA / CX-20 innenseitig mit Alu oder noch besser Kupferfolie (an GND) auskleidet. Das GNSS sollte man mit Heisskleber fixieren und auf Schrauben verzichten.
Finale Tests
Bevor man das Gehäuse wieder zusammenfügt (21 Schrauben inklusive Landegestell) sollte man alles ausprobieren, auch die Motoren und deren Drehrichtung (Mission Planner Motortest)
Man sollte die Schrauben nicht überziehen und kein LocTite verwenden, weil dies Plastik angreift (Rissbildung), besser öfter kontrollieren. Und beim Zusammenfügen keins der dünnen Kabel einklemmen.
Mission Planner Settings /Calibration/Hinweise
Zunächst lädt man die neue FW (derzeit AC 3.3.2), da unsere chinesischen Freunde immer noch die alte 3.2.1 zum Testen installieren. PID (Auto) Tuning ist beim beschriebenen Aufbau zunächst nicht erforderlich, der PX NOVA / CX-20 fliegt bereits mit Default Werten hinreichend gut. Überraschend agil zudem.
Man wird CGS Failsafe deaktivieren.Gut für nichts. Geofence verschiebt man auf später. Ebenso Battery FS, denn es ist ohnehin keine gute Idee mit einem neuen Modell Flugzeitrekorde zu brechen. Wichtig ist RC FS. Aber auch diese Funktion sollte man vorerst auf Land stellen, bis sichergestellt ist, dass der NOVA / CX-20 auch in den GPS Modi sehr gut fliegt. RTL ist keine Option für Erstflüge !!!
Der MAG sollte sehr sorgfältig kalibriert werden, vorzugsweise entfernt von Metall, Lautsprechern oder Smartphones. Ist alles korrekt installiert, sieht man während der Kalibrierung zwei Kugeln, die sich füllen. Die gespeicherten Offsets werden erst nach dem Re-Boot aktiv.
Nach der kompletten ACC Calibration (welche keine Perfektion erfordert) stellt sich ein gerader Horizont ein und bis dahin vom Mission Planner verkündete BAD xxxx Botschaften werden verschwinden und später nur noch selten in der EKF Initialisierungsphase oder heftigen Transportbewegungen erscheinen.
Die ersten Starts sollten erst bei sehr gutem GPS Empfang (HDOP unter 1.2) erfolgen. Das kann anfänglich auch 5 Minuten dauern, abhängig auch vom GPS Wetter. Selbst wenn man die Pre-Arm Checks ausgeschaltet hat, kann der EKF am Start hindern. Vielleicht hat man den Copter in der Einschaltphase beim Verstauen der Batterie bewegt, während der Startsequenz des PX, oder ein Bit hängt...noch einmal anstecken, dann klappt es auch.
Wenn sich der NOVA / CX-20 weigert, in AltHold zu starten, zunächst im Stabilize Mode beginnen, denn man kann noch am Boden auf Alt umschalten.
Wichtig: Zunächst im freien Feld auf niedriger Höhe üben, keine Langstrecken oder Batterierekorde anstreben, kein RTL oder gar Missionen testen. Einfach zunächst einmal in Althold testen, wie der NOVA / CX-20 fliegt. Erfahrenere Piloten werden es auch im Stabilize Mode probieren. Zeigt die Telemetrie (z.B. DroidPlanner auf OTG Tablet) sehr guten GPS Empfang, kann man danach anfangen LOITER oder POSHOLD zu testen. Funktioniert das einwandfrei (und nur dann!), funktioniert auch RTL oder Auto.
Auf einmal macht der NOVA / CX-20 richtig Spaß, ein phantastischer Übungs- und Testcopter für kleines Geld, der sich auch sehr flott bewegen lässt. Agiler als sein Pendant mit NAZA.
Wenn man später Vertrauen hat, kann man die PID optimieren (z.B. mit Autotune) und mit dem EKF spielen.
Nach dem Flug schaut man sich die Logs an, perfekter GPS Empfang
Das große CSG / DroTek wird HDOPs unter 1.0 und über 13 Sats zeigen,und das Vib Log...
Unglaublich niedrige Vibrationen.
Wenn man sich an die Vorschläge hält, wird man mit einem perfekten Vibrationsniveau belohnt. Auto Analysis zeigt dann nan, selbst bei sehr sportlichem Flug, Werte unter 0,2. Vorausgesetzt man verwendet auch vibrationsarme Motoren i.V. mit originalen DJI 9450 Propellern (5-6€/Paar) und keine billigen Clone Props. Die DJI 8045 Kopien des NOVA / CX-20 wird man ohnehin nicht montieren, denn diese Schlabberlöffel verkürzten schon im Original die Flugzeit.
Perfektes Loiter !
Viel Spaß !
Anmerkungen: Sämtliche Bilder und Textauszüge dürfen für private Zwecke verwendet werden, indes weder gewerblich noch für Verkaufsanzeigen oder Auktionshäuser.
Zuletzt bearbeitet:


") Noch eine Bemerkung dazu: Wenn man 4S verwenden will, darf man auch das CX Mainboard mit 16V Elkos nicht verwenden. Ich habe selbst mit 3S nie ein Problem gehabt, allerdings ein Abfluggewicht von 1300g nie überschritten. Die E300 mit 9450 lassen sich ohne Gimbal selbst an 3S sportlich bewegen. 4S hat halt den Charme geringerer Ströme, weshalb ich mit den DJI Motoren mit 15A ESC auskäme.
Noch eine Bemerkung dazu: Wenn man 4S verwenden will, darf man auch das CX Mainboard mit 16V Elkos nicht verwenden. Ich habe selbst mit 3S nie ein Problem gehabt, allerdings ein Abfluggewicht von 1300g nie überschritten. Die E300 mit 9450 lassen sich ohne Gimbal selbst an 3S sportlich bewegen. 4S hat halt den Charme geringerer Ströme, weshalb ich mit den DJI Motoren mit 15A ESC auskäme.
