
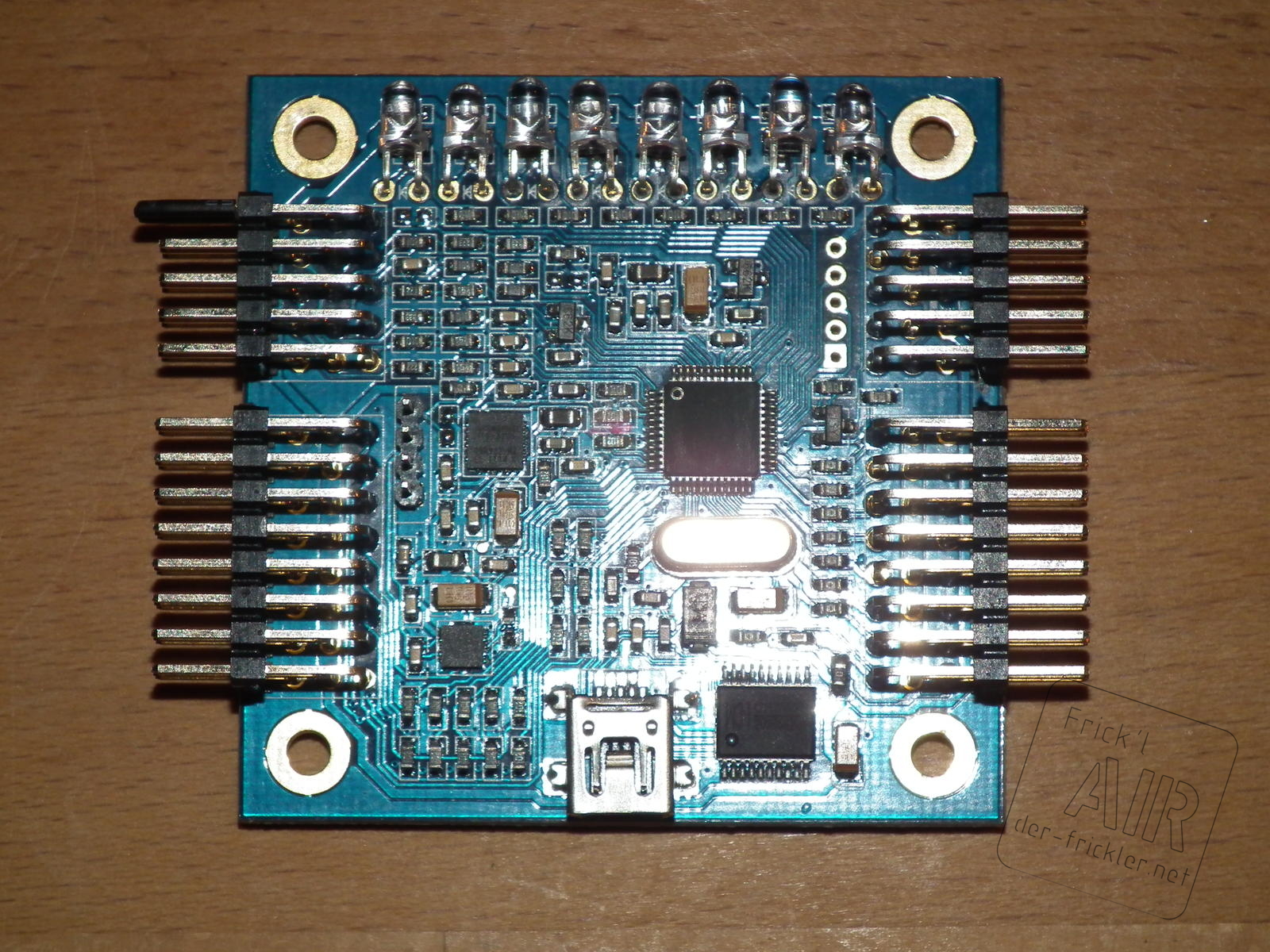
Da ich ja immer gerne Rumexperimentiere und auf der Suche nach einem FC für meinen neuen Y4 Copter war fiel mir an Weihnachten das neue Rabbit Board von GoodLuckBuy ins Auge:

http://www.goodluckbuy.com/rabbit-flight-controller-for-quadcopter-multicopter-with-3d-accelerometer-gyroscope.html
Features:
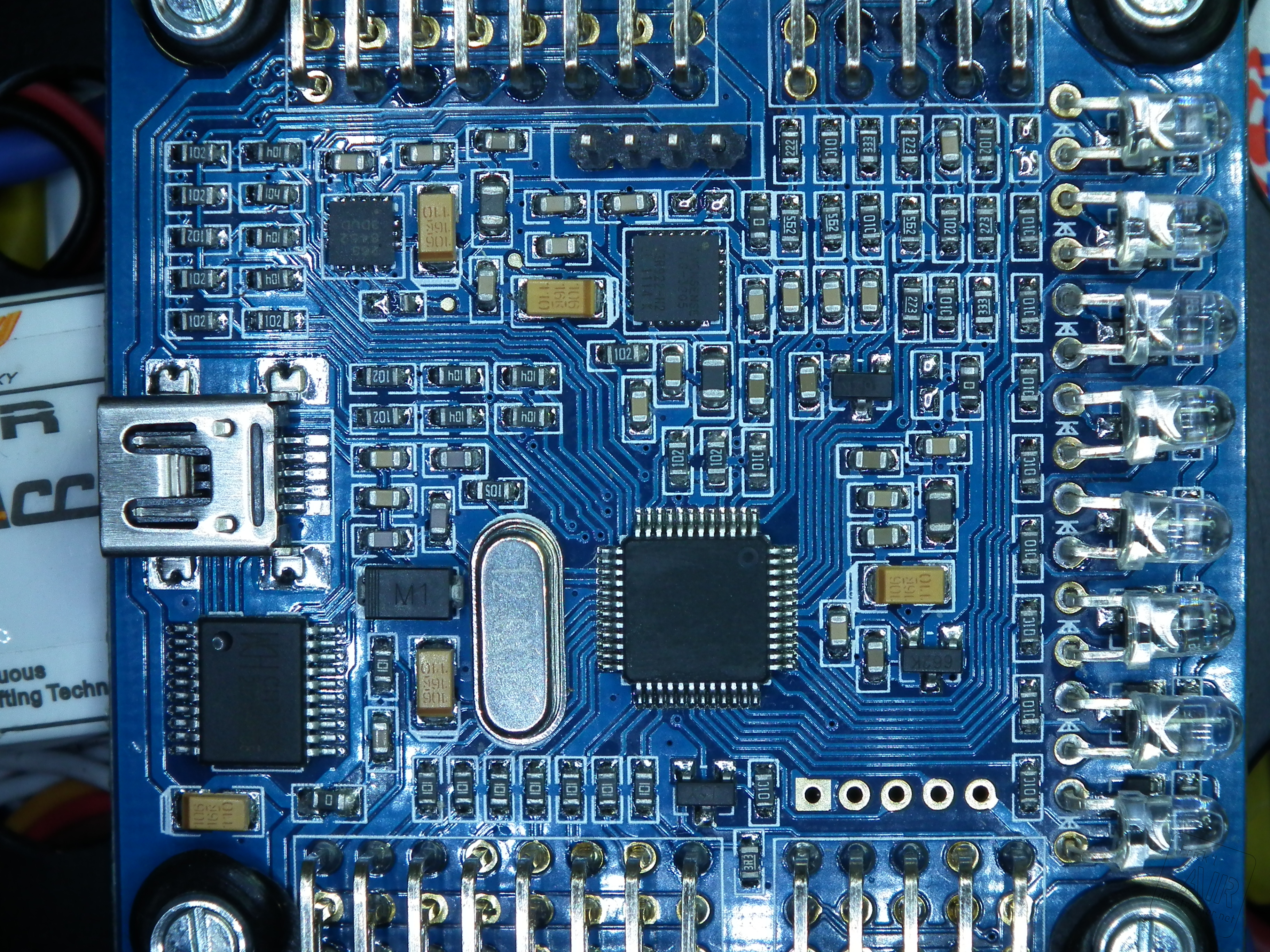
- 32 digits 50 MHZ CPU
- 3-Achs Gyro und ACC von Werk aus, Erweiterbar mit Baro, Ultraschall, Kompass und wohl GPS.
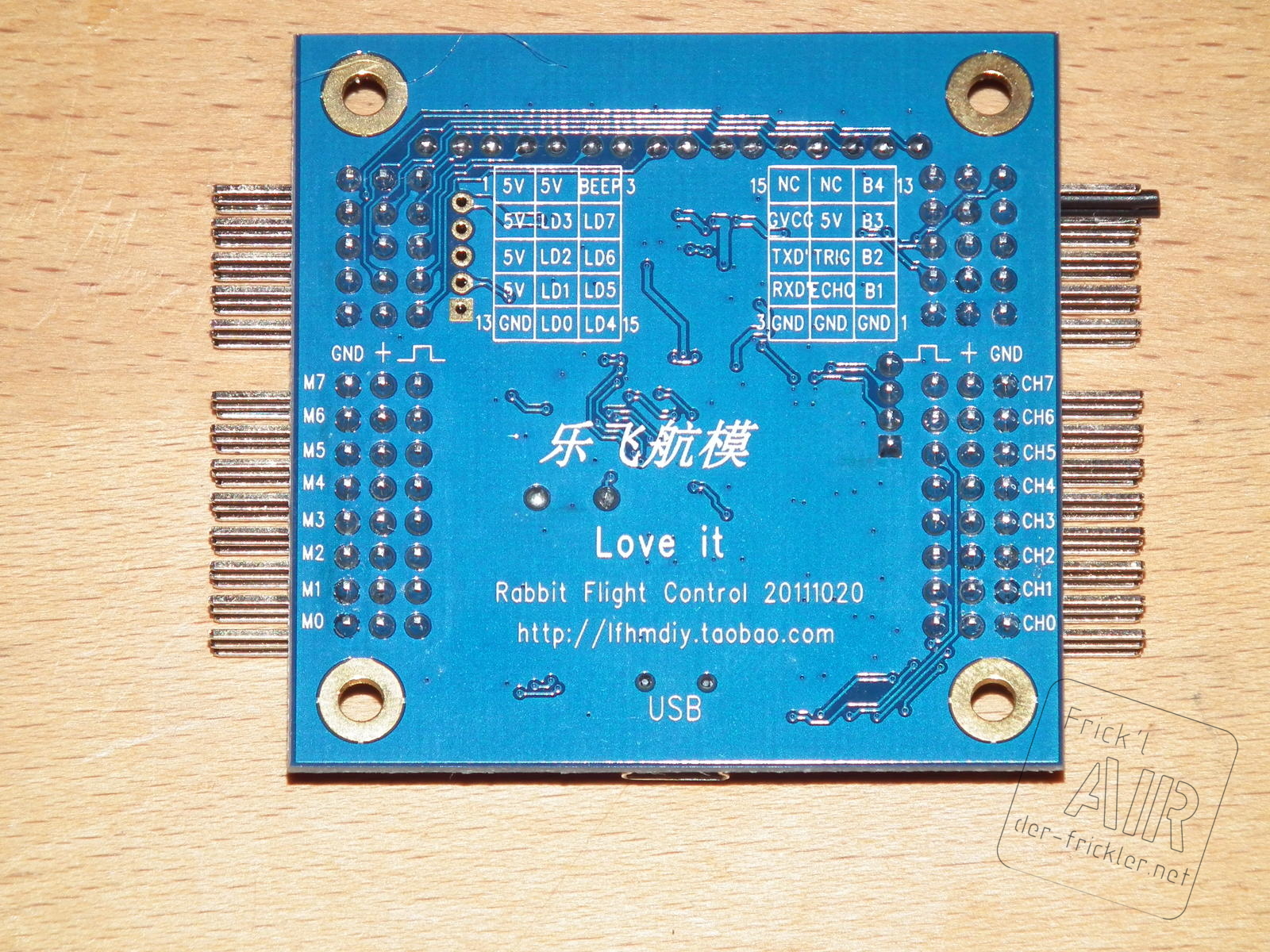
- 8 Ein und Ausgänge,
- Kann alle soweit alle Kopter konfigurationen
- 2ch Cam-Stabi (außer beim Okto)
- USB zur Configuration am Rechner
- Einzelzellenüberwachung des LiPos
und am wichtigsten: 8 Leds und Led Ausgänge mit wilden Lichteffekten
Obwohl es damals kaum Berichte und nur eine Chinesische Anleitung und Software gab wurde bestellt. Gestern kam das Ding an:


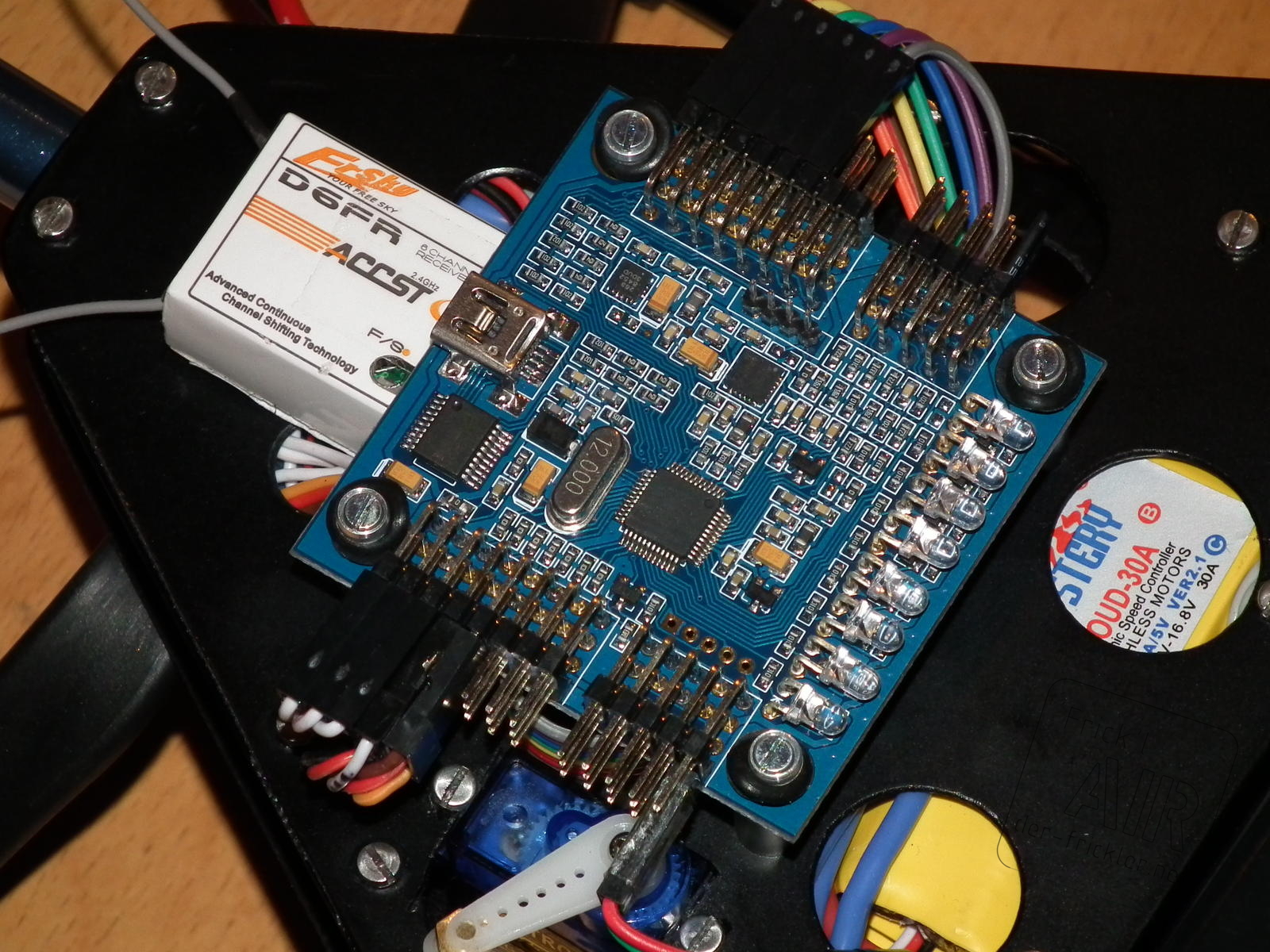
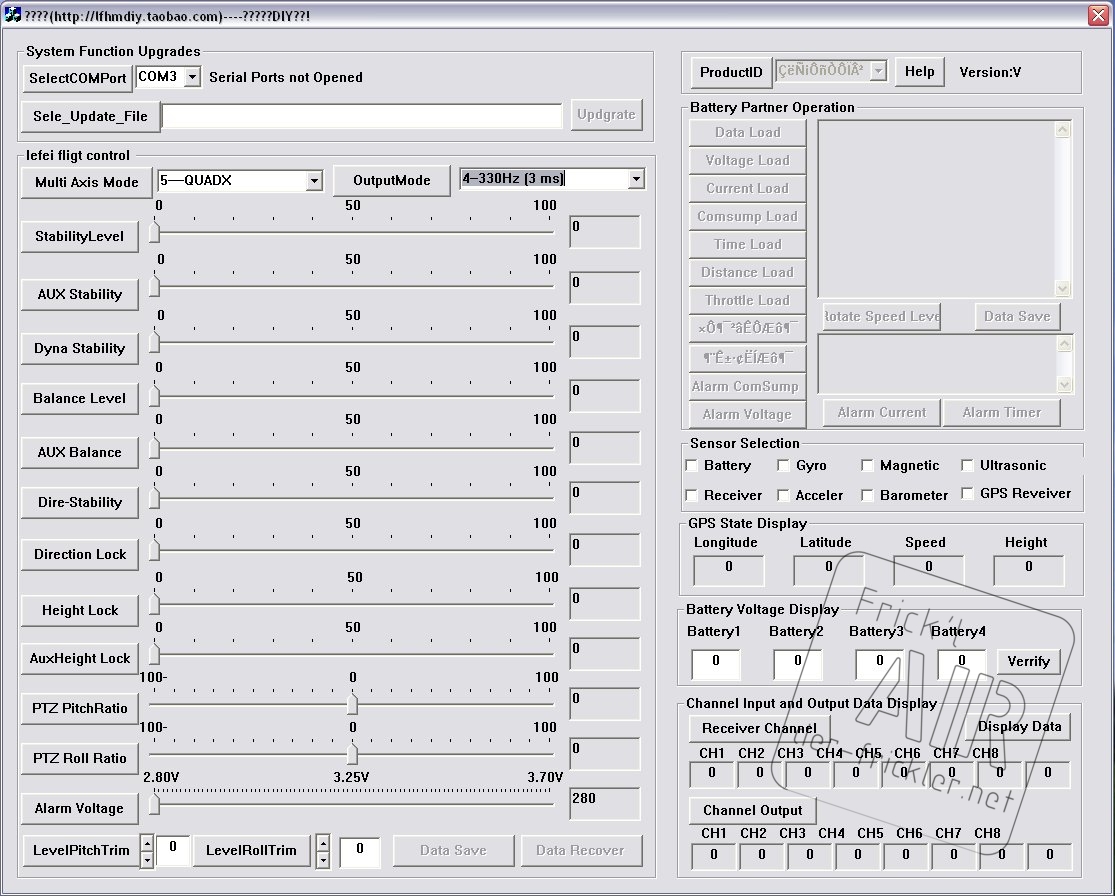
Mittlerweile gibt es auf der GoodLuckBuy Seite auch eine wenn auch schlecht übersetzte Anleitung und Englische Software.
Also ran damit an den Rechner, das funktionierte unter XP ohne Probleme. Da der Y4 noch nicht ganz fertig ist kam das Board noch schnell auf den test X4. In der Software nur auf Quattro-X umgestellt, Empfänger ran (4ch fürs fliegen, ch5-6 für Flugmodi-Schalter und ch7-8 fürs manuelle übersteuern der Camstabi), Regler angelernt laut Board Anleitung und los gehts.
Nach dem Selbsttest beim Anstecken zeigt er erst per LED an welche Sensoren vorhanden sind und funktionieren.
Dann geht er in den Unarmed State in dem alle 8 LEDs "atmen" sprich hell-dunkel faden. Nach dem Armen ist dann K.I.T.T. am Steuer - zumindest den LEDs nach ;_)
Also Los, Gas rein und ENERGIE! Das Ding schwebt selenruhig im Zimmer über dem Bett, erster Test bestanden!
Bis dato bin ich sehr zufrieden mit dem Board, Konfiguration war ein Kinderspiel und schweben tut es schon mal ähnlich gut wie die OpenPilot CC.
Wenns am Wochenende tocken ist das das Ding mal draußen zeigen was es kann.
Wenn ich das richtig recherchiert habe sollten mein Baro und Kompass aus dem Multiwii Zubehör passen, eine passendes Ultraschall Modul hab ich auch noch hier liegen. GPs kommt seriell ran, da werde ich auch mal mit meinen vorhandenen Modulen Spielen.
Es bleibt also spannend, ich werde weiter berichten.
Mehr wie immer unter:
http://der-frickler.net/modellbau/planes/y4copter#rabbit_flight_controller
Abschließend noch ein paar Links mit weiterführenden Infos:
Board bei GLB
Herstellerseite
rcgroups1
rcgroups2
http://www.goodluckbuy.com/rabbit-flight-controller-for-quadcopter-multicopter-with-3d-accelerometer-gyroscope.html
Features:
- 32 digits 50 MHZ CPU
- 3-Achs Gyro und ACC von Werk aus, Erweiterbar mit Baro, Ultraschall, Kompass und wohl GPS.
- 8 Ein und Ausgänge,
- Kann alle soweit alle Kopter konfigurationen
- 2ch Cam-Stabi (außer beim Okto)
- USB zur Configuration am Rechner
- Einzelzellenüberwachung des LiPos
und am wichtigsten: 8 Leds und Led Ausgänge mit wilden Lichteffekten
Obwohl es damals kaum Berichte und nur eine Chinesische Anleitung und Software gab wurde bestellt. Gestern kam das Ding an:
Mittlerweile gibt es auf der GoodLuckBuy Seite auch eine wenn auch schlecht übersetzte Anleitung und Englische Software.
Also ran damit an den Rechner, das funktionierte unter XP ohne Probleme. Da der Y4 noch nicht ganz fertig ist kam das Board noch schnell auf den test X4. In der Software nur auf Quattro-X umgestellt, Empfänger ran (4ch fürs fliegen, ch5-6 für Flugmodi-Schalter und ch7-8 fürs manuelle übersteuern der Camstabi), Regler angelernt laut Board Anleitung und los gehts.
Nach dem Selbsttest beim Anstecken zeigt er erst per LED an welche Sensoren vorhanden sind und funktionieren.
Dann geht er in den Unarmed State in dem alle 8 LEDs "atmen" sprich hell-dunkel faden. Nach dem Armen ist dann K.I.T.T. am Steuer - zumindest den LEDs nach ;_)
Also Los, Gas rein und ENERGIE! Das Ding schwebt selenruhig im Zimmer über dem Bett, erster Test bestanden!
Bis dato bin ich sehr zufrieden mit dem Board, Konfiguration war ein Kinderspiel und schweben tut es schon mal ähnlich gut wie die OpenPilot CC.
Wenns am Wochenende tocken ist das das Ding mal draußen zeigen was es kann.
Wenn ich das richtig recherchiert habe sollten mein Baro und Kompass aus dem Multiwii Zubehör passen, eine passendes Ultraschall Modul hab ich auch noch hier liegen. GPs kommt seriell ran, da werde ich auch mal mit meinen vorhandenen Modulen Spielen.
Es bleibt also spannend, ich werde weiter berichten.
Mehr wie immer unter:
http://der-frickler.net/modellbau/planes/y4copter#rabbit_flight_controller
Abschließend noch ein paar Links mit weiterführenden Infos:
Board bei GLB
Herstellerseite
rcgroups1
rcgroups2
")


.jpg)

