
Hallo zusammen,
ich habe mir einen kleinen 250er Racer von Tarot zusammengebaut und habe ein Problem mit YAW und
YAW-Jumps bei schnellen Bewegungen die ich scheinbar über die PID`s nicht in den Griff bekomme.
Wenn ich schnelle YAW`s mache, steuert jeweils auf der anderen Seite das Heck extremst nach,
sprich steuern nach links, Motor hinten rechts dreht hoch.
Der Kopter macht dann schonmal gerne einen hops von eins, zwei Metern in die Richtung die man dreht.
Habe bereits viele Einstellungen für YAW Rate/Atti PIDS durchprobiert, bekomme aber nichts brauchbares.
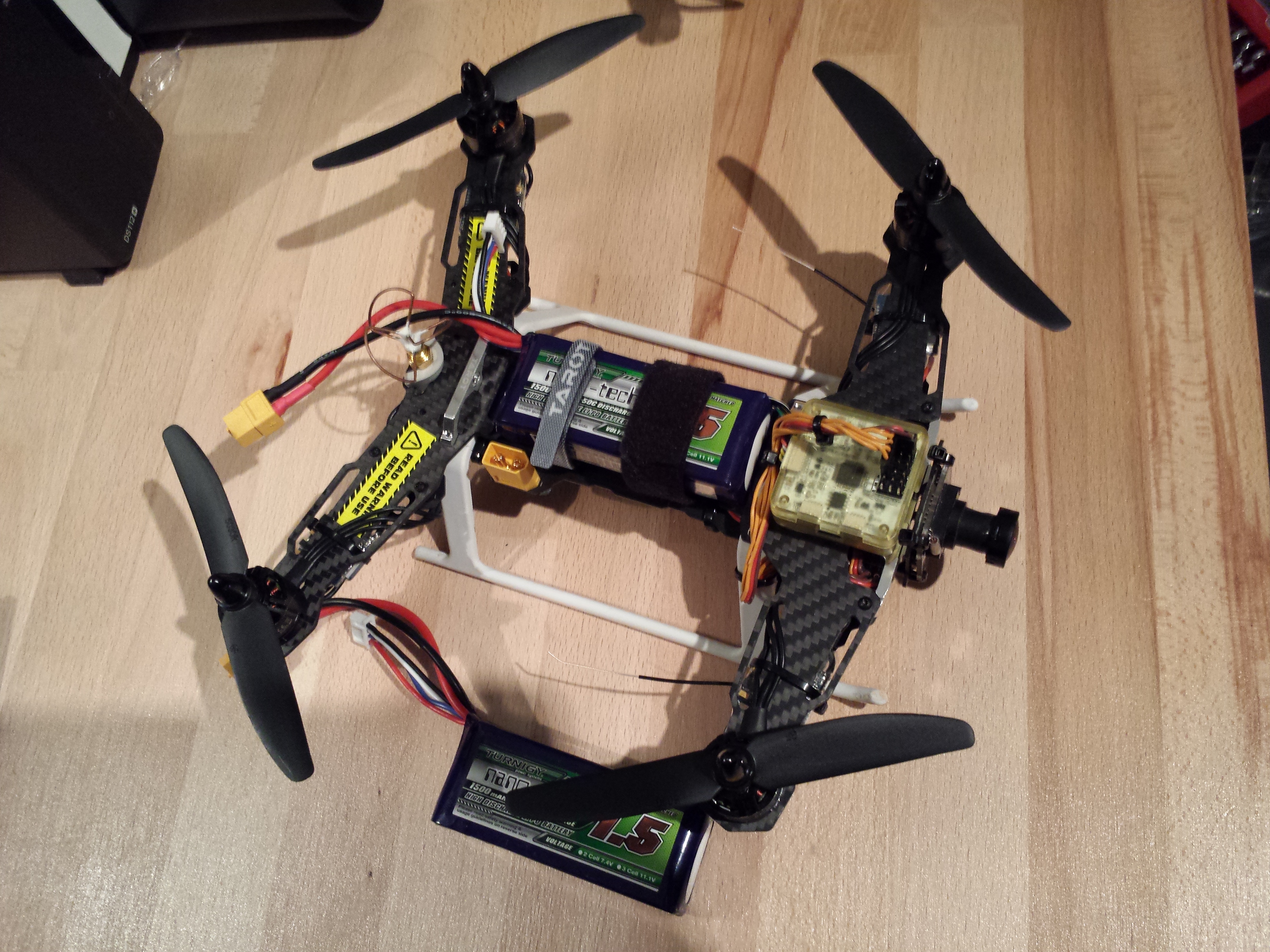
Könnte das Problem am (fehlenden) Center of Gravity liegen? Beim Tarot ist es erstmal so vorgesehen das Board dort unterzubringen.
Welche PID-Werte beeinflussen dieses Verhalten bzw. verstärken das Problem. Ich bin mit P schon soweit runter
gegangen das er ganz schwammig wurde, der Effekt war zwar weniger, das Quad aber nicht fliegbar.
Vielen Dank vorab.
ich habe mir einen kleinen 250er Racer von Tarot zusammengebaut und habe ein Problem mit YAW und
YAW-Jumps bei schnellen Bewegungen die ich scheinbar über die PID`s nicht in den Griff bekomme.
Wenn ich schnelle YAW`s mache, steuert jeweils auf der anderen Seite das Heck extremst nach,
sprich steuern nach links, Motor hinten rechts dreht hoch.
Der Kopter macht dann schonmal gerne einen hops von eins, zwei Metern in die Richtung die man dreht.
Habe bereits viele Einstellungen für YAW Rate/Atti PIDS durchprobiert, bekomme aber nichts brauchbares.
Könnte das Problem am (fehlenden) Center of Gravity liegen? Beim Tarot ist es erstmal so vorgesehen das Board dort unterzubringen.
Welche PID-Werte beeinflussen dieses Verhalten bzw. verstärken das Problem. Ich bin mit P schon soweit runter
gegangen das er ganz schwammig wurde, der Effekt war zwar weniger, das Quad aber nicht fliegbar.
Vielen Dank vorab.
")

