
Hallo zusammen,
Ich bin Christoph und neu in diesem Forum. Leider, und das schonmal vorweg, habe ich keinerlei Erfahrungen im RC Modellbau.
Ich plane seit einigen Jahren einen Fahrzeug Nachbau aus Messing im Maßstab 1:5 den ich fernsteuerbar bauen möchte. Es handelt sich um einen Cord 810 von 1936.
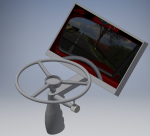
Gesteuert über eine Handheld Fernbedienung im Eigenbau mit Bildschirm für Echtzeitübertragung aus Fahrerposition (Screenshots im Anhang) , sowie über ein über ein Adruino Board.
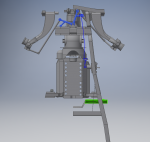
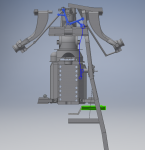
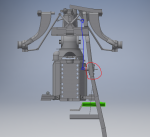
Im Fahrzeug greife ich von einem Servo direkt auf das Lenkrad mir eingelegtem Zahnradkranz zu und behalte somit die originale Lenkgeometrie, samt Lenkgetriebe (Schneckengetriebe)
Ich bin gerade dabei alle Komponenten dafür zusammen zustellen und ein wenig Kopfschmerzen macht mir da die Lenkung.
Ich habe 3,25 Umdrehungen des Lenkgetriebes von ganz links bis rechts. An der Fernsteuerung möchte ich natürlich ich die selben Lenkverhältnisse haben, habe allerdings keine mechanische Neutralstellung durch Federn etc.. Also muss das Lenkrad in der aktuellen Position bestimmbar sein.
Bei Einschalten des Fahrzeugs soll der Lenkhebel am Lenkgetriebe maximal in beide Richtungen betätigt werden und durch zwei Endschalter begrenzt werden. Dann soll die Position des Lenkrades der Handheld auf das Fahrzeug übertragen werden.
Der Sinn hinter dieser recht komplizierten Lenkungskonstruktion samt Endschalter etc. ist, dass ich den Servo unter dem Lenkrad entfernen kann und somit auch ein Modellfahrzeug für die Vitrine (wenn auch eine Große) habe.
Nun zu meinen Fragen:
Welchen Servo könntet Ihr mir da empfehlen?
Wie könnte die Positionsabfrage des Lenkrads am Handheld Controller aussehen?
Bitte seht mir nach, dass ich keinerlei RC-Wissen habe.
Ich würde mich über jegliche Hilfe von euch sehr freuen
Mit freundlichen Grüßen
Christoph
Ich bin Christoph und neu in diesem Forum. Leider, und das schonmal vorweg, habe ich keinerlei Erfahrungen im RC Modellbau.
Ich plane seit einigen Jahren einen Fahrzeug Nachbau aus Messing im Maßstab 1:5 den ich fernsteuerbar bauen möchte. Es handelt sich um einen Cord 810 von 1936.
Gesteuert über eine Handheld Fernbedienung im Eigenbau mit Bildschirm für Echtzeitübertragung aus Fahrerposition (Screenshots im Anhang) , sowie über ein über ein Adruino Board.
Im Fahrzeug greife ich von einem Servo direkt auf das Lenkrad mir eingelegtem Zahnradkranz zu und behalte somit die originale Lenkgeometrie, samt Lenkgetriebe (Schneckengetriebe)
Ich bin gerade dabei alle Komponenten dafür zusammen zustellen und ein wenig Kopfschmerzen macht mir da die Lenkung.
Ich habe 3,25 Umdrehungen des Lenkgetriebes von ganz links bis rechts. An der Fernsteuerung möchte ich natürlich ich die selben Lenkverhältnisse haben, habe allerdings keine mechanische Neutralstellung durch Federn etc.. Also muss das Lenkrad in der aktuellen Position bestimmbar sein.
Bei Einschalten des Fahrzeugs soll der Lenkhebel am Lenkgetriebe maximal in beide Richtungen betätigt werden und durch zwei Endschalter begrenzt werden. Dann soll die Position des Lenkrades der Handheld auf das Fahrzeug übertragen werden.
Der Sinn hinter dieser recht komplizierten Lenkungskonstruktion samt Endschalter etc. ist, dass ich den Servo unter dem Lenkrad entfernen kann und somit auch ein Modellfahrzeug für die Vitrine (wenn auch eine Große) habe.
Nun zu meinen Fragen:
Welchen Servo könntet Ihr mir da empfehlen?
Wie könnte die Positionsabfrage des Lenkrads am Handheld Controller aussehen?
Bitte seht mir nach, dass ich keinerlei RC-Wissen habe.
Ich würde mich über jegliche Hilfe von euch sehr freuen
Mit freundlichen Grüßen
Christoph
Anhänge
-
 102,2 KB Aufrufe: 42
102,2 KB Aufrufe: 42 -
 125,6 KB Aufrufe: 49
125,6 KB Aufrufe: 49 -
 382,8 KB Aufrufe: 43
382,8 KB Aufrufe: 43 -
 320,3 KB Aufrufe: 44
320,3 KB Aufrufe: 44 -
 343,6 KB Aufrufe: 44
343,6 KB Aufrufe: 44 -
 564,5 KB Aufrufe: 42
564,5 KB Aufrufe: 42 -
 435,6 KB Aufrufe: 39
435,6 KB Aufrufe: 39 -
 594,7 KB Aufrufe: 50
594,7 KB Aufrufe: 50 -
 442,8 KB Aufrufe: 51
442,8 KB Aufrufe: 51 -
 328,5 KB Aufrufe: 52
328,5 KB Aufrufe: 52 -
 287,6 KB Aufrufe: 42
287,6 KB Aufrufe: 42
")

