
Hallo Leute,
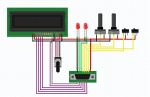
Ich beschäftige mich nun schon ein bisschen mit Inav und denke, dass ich dort nicht weiter komme. Mein Projekt beinhaltet ein Motorboot, einen Kompass und ein Gps-Modul sowie eine kleine Anzeige, ein Poti, ein Schalter und zwei LEDs.
Nun zur Idee:
Ich möchte für die Geschwindigkeit und den Kompasskurs jeweils einen einzelnen Autopiloten haben.
Sprich ein Poti/Drehtaster(keine Ahnung wie man diesen Dingern sagt) um Kurs und Geschwindigkeit einzustellen, ein Schalter um den jeweiligen Autopiloten zu aktivieren, eine LED, welchen den Status anzeigt sowie ein Bildschirm, auf den ich den aktuellen Kurs/ Geschwindigkeit sowie der ausgewählte Wert sehe.
Wunderschön wäre es, wenn ein Horn oder so aktiviert werden kann, falls man vom Kurs/Speed abweicht.
Meine ganz grundsätzliche Frage an euch:
Ist sowas möglich? Auch mit Inav oder brauche ich dazu Ardupilot?
Wenn ja: mit welcher Schnittstelle kann man da arbeiten?
Ich beschäftige mich nun schon ein bisschen mit Inav und denke, dass ich dort nicht weiter komme. Mein Projekt beinhaltet ein Motorboot, einen Kompass und ein Gps-Modul sowie eine kleine Anzeige, ein Poti, ein Schalter und zwei LEDs.
Nun zur Idee:
Ich möchte für die Geschwindigkeit und den Kompasskurs jeweils einen einzelnen Autopiloten haben.
Sprich ein Poti/Drehtaster(keine Ahnung wie man diesen Dingern sagt) um Kurs und Geschwindigkeit einzustellen, ein Schalter um den jeweiligen Autopiloten zu aktivieren, eine LED, welchen den Status anzeigt sowie ein Bildschirm, auf den ich den aktuellen Kurs/ Geschwindigkeit sowie der ausgewählte Wert sehe.
Wunderschön wäre es, wenn ein Horn oder so aktiviert werden kann, falls man vom Kurs/Speed abweicht.
Meine ganz grundsätzliche Frage an euch:
Ist sowas möglich? Auch mit Inav oder brauche ich dazu Ardupilot?
Wenn ja: mit welcher Schnittstelle kann man da arbeiten?
Anhänge
-
 87,2 KB Aufrufe: 18
87,2 KB Aufrufe: 18
")


