
Hallo liebe FPV - Gemeinde,
Ich habe mir in den letzten Wochen, gestützt (gestützt ist das falsche Wort, ich habe schamlos nach gebaut") ) durch den tollen Baubericht von nijamic und viel WhatsApp Hilfe von FelipeRc meinen ersten Flieger selbst gebaut. Euch beiden gebührt ein besonderes Dankeschön. Außerdem wurde ich durch den Marktplatz kräftig mit Teilen versorgt.
) durch den tollen Baubericht von nijamic und viel WhatsApp Hilfe von FelipeRc meinen ersten Flieger selbst gebaut. Euch beiden gebührt ein besonderes Dankeschön. Außerdem wurde ich durch den Marktplatz kräftig mit Teilen versorgt.
Ich poste diesen Baubericht in der Hoffnung, vom einen oder anderen weitere Impulse zu bekommen oder vielleicht auch den einen oder anderen auf neue Ideen zu bringen.
Daher, spart bitte nicht mit Fragen oder Kritik, ich bin im ModellBAU noch neu, alle bisherigen Modelle mussten nur gesteckt werden.
Die verbauten Komponenten in kurzer Übersicht:
- Skywaler 1680
- Scharniere für sämtliche Ruder
- GoPro2 + Sony TVL 600
- 25mw 5.8 Ghz Immersion RC Videosender
- 4 Savöx Servos
- Turningy 3536/8 1000KV Motor mit einer 9x6 Luftschraube
- 55 A Regler
- 4s 5000mAH Akku
- komplettes Eagle Tree System (Logger, OSD, GPS, Guardian)
- Antennenset von Rabe2000
Den Bausatz für den Skywalker lieferte die Bucht. Ich hatte keine Lust auf Ärger mit dem Zoll und langen Lieferfristen, daher bot sich die eine Auktion geradezu an.
3 - 2 - 1... meins

Damit fing die Konstruktionsphase an.
Ich habe mich, wie eingangs erwähnt, sehr stark an ninjamic gehalten, ebenfalls Savöx Servos verbaut, ebenfalls eine Lufthutze für den Fahrtenregler gebastelt und bin nur in einigen Punkten abgewichen. Ich gehe in der nun folgenden Serie auf meine Änderungen und Ideen näher ein und würde mich über Feedback dazu freuen.
Los ging es mit einer Kamerahalterung, momentan noch starr, aber mit Option auf einen Pan / Tilt Nachrüstsatz.
Da mir für mein Vorhaben GFK zu unflexibel war, habe ich mich als Ausgangsmaterial für 0,8mm Aluminiumblech entschieden. So konnte ich die Halterung direkt an die Cockpitform anpassen.

als Kamerhalterung dieses hier:

Das ganze wird über diese Konstruktion kugelgelagert verbunden:


und sieht fertig so aus:


Die Rückseite ist mit grünem Filz beklebt, ich wollte mir das GoPro Gehäuse nicht so verkratzen. Gewicht der Halterung ohne Kamera sind 149 Gramm, das größte Gewicht fällt auf das Kugellager zurück, ich muss mir irgendwann mal eins aus Kunststoff besorgen, dann wären bestimmt noch 20 Gramm machbar.
Momentan ist die Mechanik festgesetzt, geplant ist aber der Einbau eines 360 Grad Servos für den vollen Rundum blick.
Kommen wir zum Innenleben:

Oben rechts kann man eine gebogene Gewindestange erkennen. Davon gibt es 2 Stück, eins direkt in der Nase und dieses hier. An ihnen wird die Kamerahalterung befestigt. Im linken Teil sieht man ein gebogenes U und eine dünne, eingeklebte Aluminiumplatte. Dies ist die schraubbare Tragflächenhalterung.
In den Mittelteil kommt eine 2. Ebene um dem Kabelwirrwarr die Stirn zu bieten.
Erste Versuche:

Eagle Tree und Empfänger:

GPS, Eagle Tree und Motor:

Mein Eagle Tree hat mir übrigens beim ersten Testlauf den Fahrtenregler gekillt. Und da hatte ich noch Glück, der war immerhin die günstigste Komponente im System. Eins der Kabel die vom Empfänger in das OSD gehen hatte einen Kabeldreher. Plus ging auf Masse, ein Kurzschluss wie im Lehrbuch.
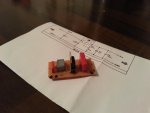
Ein weiteres zu Lösendes Problem bestand in der Stromversorgung der Sony TVL. Die hätte gern 12 V, der Akku liefert aber 14.4 V. Hier hab ich mir eine kleine Platine zum Spannungsregeln gelötet und im oberen Bereich neben dem Fahrtenregler platziert.
Spannungsregler:
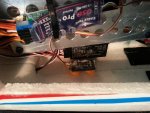
im eingebauten Zustand:

Die Sendeantenne für das Videosignal ist im Heck gelandet, Antenne nach unten raus. Geschützt wird das ganze durch die Plastikkugel die Rabe den Antennen beigelegt hat und einer separaten, selbst gebauten Kufe aus Kunststoff. Im 2. Bild sind sehr schön die Ruderscharniere, die Schutzkugel und die Kufe zu sehen.


Die Tragflächen werden hiermit befestigt:

und alles zusammen sieht aktuell so aus:

auf der linken Seite ist die Lufthutze zu sehen, die ninjamic so schön entwickelt hat:


Auf der to do Liste für die kommende Woche steht nun noch die Heckstabilisierung, da das Leitwerk noch ziemlich wackelig ist. Gern hätte ich etwas abschraubbares, damit man das Höhenleitwerk zum Transport abnehmen kann.
Bin gerade am Grübeln wie man das realisieren kann. Außerdem muss noch ein Streifen Klebeband über die Zwischenräume an den Rudern.
Was sagt Ihr? Lob? Kritik? Verbesserungen?
Der Jungfernflug ist fürs nächste Wochenende geplant, wer dazu kommen will, ist Herzlich eingeladen, bin um jeden fachlichen Rat dankbar. Immerhin schicke ich diesmal nicht "nur" 100€ Schaumwaffel in die Luft, sondern eben dieses Baby.
Gesamt Abfluggewicht: 2220 Gramm
******************************************************************************
Letzten Sonntag fand, unter fachkundiger Anleitung von FelipeRC der erste Flugversuch statt.
Der Flug verlief recht mittelmäßig, wir hatten viel zu viel Wind und nach Kinderkrankheiten im Eagletree. Große Probleme hatte uns der Guardian Stabilizer bereitet, der wohl durch Motorvibrationen so gestört wurde, dass der künstliche Horizont nach unten links weg wanderte und der Walker die ganze Zeit versuchte dorthin zu kommen. Dank Felipe ist aber alles ganz geblieben, inzwischen liegt der Guardian auf einem 3 Wege Schalter und kann im Flug deaktiviert werden. Außerdem haben wir den Sensor vom Rumpf entkoppelt, hier brachte mich der Fachberater von Conrad auf eine tolle Idee, aber seht selbst:

2 handelsübliche Ohropax und etwas Heißkleber ergeben eine wunderbare Schwingungsdämpfung für Sensoren. Die filtern zwar nicht alles raus, der Fingertest behauptet aber, dass der Sensor viel ruhiger liegt.
Außerdem hat das Leitwerk inzwischen eine Versteifung durch einfach Ruderhörner und etwas gebogenem Draht erhalten. Die Hörner sind absichtlich nicht geschraubt, damit ich eine Sollbruchstelle an der Verstrebung habe. Der dünne Stabilisierungsdraht wird noch mit einem kleinen Stellring versehen und kann dann unten abgeschraubt und oben Ausgehakt werden. So bleibt das Leitwerk abnehmbar.


So wie das Wetter besser wird, geht es wieder ans testen. Ich halte Euch auf dem laufenden.
******************************************************************************
Es geht weiter. Nach den ersten Flügen kommen die ersten Änderungen, das ist nun mal, gerade als Anfänger, so.
Die Ruderhörner als Stabilisator zu nutzen hat sich als zu unpraktisch heraus gestellt. Die sind gleich wieder raus geflogen.
Habe das ganze nun mit 1mm Draht + kleiner Aufnahme gelöst. Die Variante gefällt mir super, da ich damit das komplette Höhenleitwerk nicht nur stabilisiere, sondern auch gleich ausrichten kann.

Die Einzelteile mit einem Gewicht von 16 Gramm

Eingebaut

Ausgerichtet

Transport
Außerdem habe ich ihm, wie schon am Anfang in diesem Artikel vermutet, ein neues Mount für die Kameras bauen dürfen. Das alte war wie eine Schrankwand und flog sich auch genau so. Jetzt ist alles möglichst klein und dicht beieinander.


So wie mein neues Guardian Modul da ist, geht es weiter zum testen.
Ach ja, den Torso habe ich, wie im Baubericht von AndreasL90 vorgeschlagen, mit Strappingtape umwickelt. Sieht doof aus, hält aber Bombe und versteift richtig gut.
Ich habe mir in den letzten Wochen, gestützt (gestützt ist das falsche Wort, ich habe schamlos nach gebaut
) durch den tollen Baubericht von nijamic und viel WhatsApp Hilfe von FelipeRc meinen ersten Flieger selbst gebaut. Euch beiden gebührt ein besonderes Dankeschön. Außerdem wurde ich durch den Marktplatz kräftig mit Teilen versorgt.Ich poste diesen Baubericht in der Hoffnung, vom einen oder anderen weitere Impulse zu bekommen oder vielleicht auch den einen oder anderen auf neue Ideen zu bringen.
Daher, spart bitte nicht mit Fragen oder Kritik, ich bin im ModellBAU noch neu, alle bisherigen Modelle mussten nur gesteckt werden.
Die verbauten Komponenten in kurzer Übersicht:
- Skywaler 1680
- Scharniere für sämtliche Ruder
- GoPro2 + Sony TVL 600
- 25mw 5.8 Ghz Immersion RC Videosender
- 4 Savöx Servos
- Turningy 3536/8 1000KV Motor mit einer 9x6 Luftschraube
- 55 A Regler
- 4s 5000mAH Akku
- komplettes Eagle Tree System (Logger, OSD, GPS, Guardian)
- Antennenset von Rabe2000
Den Bausatz für den Skywalker lieferte die Bucht. Ich hatte keine Lust auf Ärger mit dem Zoll und langen Lieferfristen, daher bot sich die eine Auktion geradezu an.
3 - 2 - 1... meins
Damit fing die Konstruktionsphase an.
Ich habe mich, wie eingangs erwähnt, sehr stark an ninjamic gehalten, ebenfalls Savöx Servos verbaut, ebenfalls eine Lufthutze für den Fahrtenregler gebastelt und bin nur in einigen Punkten abgewichen. Ich gehe in der nun folgenden Serie auf meine Änderungen und Ideen näher ein und würde mich über Feedback dazu freuen.
Los ging es mit einer Kamerahalterung, momentan noch starr, aber mit Option auf einen Pan / Tilt Nachrüstsatz.
Da mir für mein Vorhaben GFK zu unflexibel war, habe ich mich als Ausgangsmaterial für 0,8mm Aluminiumblech entschieden. So konnte ich die Halterung direkt an die Cockpitform anpassen.
als Kamerhalterung dieses hier:
Das ganze wird über diese Konstruktion kugelgelagert verbunden:
und sieht fertig so aus:
Die Rückseite ist mit grünem Filz beklebt, ich wollte mir das GoPro Gehäuse nicht so verkratzen. Gewicht der Halterung ohne Kamera sind 149 Gramm, das größte Gewicht fällt auf das Kugellager zurück, ich muss mir irgendwann mal eins aus Kunststoff besorgen, dann wären bestimmt noch 20 Gramm machbar.
Momentan ist die Mechanik festgesetzt, geplant ist aber der Einbau eines 360 Grad Servos für den vollen Rundum blick.
Kommen wir zum Innenleben:
Oben rechts kann man eine gebogene Gewindestange erkennen. Davon gibt es 2 Stück, eins direkt in der Nase und dieses hier. An ihnen wird die Kamerahalterung befestigt. Im linken Teil sieht man ein gebogenes U und eine dünne, eingeklebte Aluminiumplatte. Dies ist die schraubbare Tragflächenhalterung.
In den Mittelteil kommt eine 2. Ebene um dem Kabelwirrwarr die Stirn zu bieten.
Erste Versuche:
Eagle Tree und Empfänger:
GPS, Eagle Tree und Motor:
Mein Eagle Tree hat mir übrigens beim ersten Testlauf den Fahrtenregler gekillt. Und da hatte ich noch Glück, der war immerhin die günstigste Komponente im System. Eins der Kabel die vom Empfänger in das OSD gehen hatte einen Kabeldreher. Plus ging auf Masse, ein Kurzschluss wie im Lehrbuch.
Ein weiteres zu Lösendes Problem bestand in der Stromversorgung der Sony TVL. Die hätte gern 12 V, der Akku liefert aber 14.4 V. Hier hab ich mir eine kleine Platine zum Spannungsregeln gelötet und im oberen Bereich neben dem Fahrtenregler platziert.
Spannungsregler:
im eingebauten Zustand:
Die Sendeantenne für das Videosignal ist im Heck gelandet, Antenne nach unten raus. Geschützt wird das ganze durch die Plastikkugel die Rabe den Antennen beigelegt hat und einer separaten, selbst gebauten Kufe aus Kunststoff. Im 2. Bild sind sehr schön die Ruderscharniere, die Schutzkugel und die Kufe zu sehen.
Die Tragflächen werden hiermit befestigt:
und alles zusammen sieht aktuell so aus:
auf der linken Seite ist die Lufthutze zu sehen, die ninjamic so schön entwickelt hat:
Auf der to do Liste für die kommende Woche steht nun noch die Heckstabilisierung, da das Leitwerk noch ziemlich wackelig ist. Gern hätte ich etwas abschraubbares, damit man das Höhenleitwerk zum Transport abnehmen kann.
Bin gerade am Grübeln wie man das realisieren kann. Außerdem muss noch ein Streifen Klebeband über die Zwischenräume an den Rudern.
Was sagt Ihr? Lob? Kritik? Verbesserungen?
Der Jungfernflug ist fürs nächste Wochenende geplant, wer dazu kommen will, ist Herzlich eingeladen, bin um jeden fachlichen Rat dankbar. Immerhin schicke ich diesmal nicht "nur" 100€ Schaumwaffel in die Luft, sondern eben dieses Baby.
Gesamt Abfluggewicht: 2220 Gramm
******************************************************************************
Letzten Sonntag fand, unter fachkundiger Anleitung von FelipeRC der erste Flugversuch statt.
Der Flug verlief recht mittelmäßig, wir hatten viel zu viel Wind und nach Kinderkrankheiten im Eagletree. Große Probleme hatte uns der Guardian Stabilizer bereitet, der wohl durch Motorvibrationen so gestört wurde, dass der künstliche Horizont nach unten links weg wanderte und der Walker die ganze Zeit versuchte dorthin zu kommen. Dank Felipe ist aber alles ganz geblieben, inzwischen liegt der Guardian auf einem 3 Wege Schalter und kann im Flug deaktiviert werden. Außerdem haben wir den Sensor vom Rumpf entkoppelt, hier brachte mich der Fachberater von Conrad auf eine tolle Idee, aber seht selbst:
2 handelsübliche Ohropax und etwas Heißkleber ergeben eine wunderbare Schwingungsdämpfung für Sensoren. Die filtern zwar nicht alles raus, der Fingertest behauptet aber, dass der Sensor viel ruhiger liegt.
Außerdem hat das Leitwerk inzwischen eine Versteifung durch einfach Ruderhörner und etwas gebogenem Draht erhalten. Die Hörner sind absichtlich nicht geschraubt, damit ich eine Sollbruchstelle an der Verstrebung habe. Der dünne Stabilisierungsdraht wird noch mit einem kleinen Stellring versehen und kann dann unten abgeschraubt und oben Ausgehakt werden. So bleibt das Leitwerk abnehmbar.
So wie das Wetter besser wird, geht es wieder ans testen. Ich halte Euch auf dem laufenden.
******************************************************************************
Es geht weiter. Nach den ersten Flügen kommen die ersten Änderungen, das ist nun mal, gerade als Anfänger, so.
Die Ruderhörner als Stabilisator zu nutzen hat sich als zu unpraktisch heraus gestellt. Die sind gleich wieder raus geflogen.
Habe das ganze nun mit 1mm Draht + kleiner Aufnahme gelöst. Die Variante gefällt mir super, da ich damit das komplette Höhenleitwerk nicht nur stabilisiere, sondern auch gleich ausrichten kann.
Die Einzelteile mit einem Gewicht von 16 Gramm
Eingebaut
Ausgerichtet
Transport
Außerdem habe ich ihm, wie schon am Anfang in diesem Artikel vermutet, ein neues Mount für die Kameras bauen dürfen. Das alte war wie eine Schrankwand und flog sich auch genau so. Jetzt ist alles möglichst klein und dicht beieinander.
So wie mein neues Guardian Modul da ist, geht es weiter zum testen.
Ach ja, den Torso habe ich, wie im Baubericht von AndreasL90 vorgeschlagen, mit Strappingtape umwickelt. Sieht doof aus, hält aber Bombe und versteift richtig gut.
Zuletzt bearbeitet:

