
Hier stelle ich euch mein Projekt mit folgenden Eckdaten vor:
- mini HEXA Copter in klassischer Bauform
- 2 Achs Gimbal
- DJI Steuerung
- Akku 2200 mAh
- FPV geeignet mit 5,8 GHz Funkstecke
- GoPro als Kamera
Am Anfang stehen Überlegungen hinsichtlich Regler und Motore sowie Flugzeit.
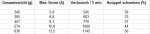
Dafür habe ich einen kleinen Prüfstand gebaut um die Daten zu ermitteln:


Getestet wurden alle Motore mit einer Luftschraube GWS 5030 x 3 Blätter

Prop fest = Propeller direkt am Motor (geschraubt) ohne die mitgelieferten Propsaver.
Hier zeigt sich schon das die einfachen Motoren gerne mal das eine oder andere Ampere Strom mehr haben möchten.
Im nächsten Test habe ich die "billig" Motoren (BL-1510) genommen um den Verbrauch in Abhängigkeit zum Gewicht zu ermitteln.
Dazu entstand die 1. Evolutionsstufe des Rahmens:

Der Rahmen ist aus Flugzeugsperrholz (Birke) ausgelasert. Die Entscheidung zum FZ-Sperrholz steht und fällt mit dem Gewicht und der Bauform. Ich wollte einen Rahmen haben der nach was aussieht, ich möchte weder Regler noch Steuerung sehen, das ganze Kabelgewirr soll verschwinden. Carbon wiegt 1,55g/cm³, Flugzeugsperrholz wiegt die Hälfte. Wenn ich also 1,5 mm FZ-Sperrholz nehme müsste ich um auf's gleiche Gewicht zu kommen 0,75er Carbon nehmen .. Da ich aber ein Rahmen zum kleben baue mit Zapfen und Löchern ist ein Fräser von 0,75 mm nötig ... das ist mir einfach zu klein") .
.
Ich habe einen "Zerbrechtest" am Sperrholz Arm durchgeführt da waren ca. 7 kg nötig um ihn abzuknicken ... also was soll's FZ-Sperrholz ist 100% ausreichend.
Naja und preiswerter ist es ausserdem.
Hier also die Schwebedaten vom miniHEX:
Durchgeführt mit den GWS 5030x3 Luftschrauben und den BL-1510 Motoren, Regler sind TURNIGY Plush 6A Steuerung zum Test nanoWii.
Zu guter letzt und um das Bild zu vervollständigen auch noch der Test verschiedener Luftschrauben an einem Motor. Dabei kommt wieder der BL-1510 zum Einsatz.
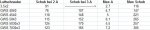
Schon spannend wie sich die GWS 5030x3 als für diese Projekt recht geeignet herausstellt, wenn man die Effizienz betrachtet.
So erste Flugversuche mit dem Copter sind vielversprechend ... er liegt super in der Luft, keine nennenswerte Vibrationen ... Bleibt in der Halle auf der Stelle stehen ... Ohne GPS ... fast eine Ewigkeit bis er anfängt zu driften.

- mini HEXA Copter in klassischer Bauform
- 2 Achs Gimbal
- DJI Steuerung
- Akku 2200 mAh
- FPV geeignet mit 5,8 GHz Funkstecke
- GoPro als Kamera
Am Anfang stehen Überlegungen hinsichtlich Regler und Motore sowie Flugzeit.
Dafür habe ich einen kleinen Prüfstand gebaut um die Daten zu ermitteln:
Getestet wurden alle Motore mit einer Luftschraube GWS 5030 x 3 Blätter
Prop fest = Propeller direkt am Motor (geschraubt) ohne die mitgelieferten Propsaver.
Hier zeigt sich schon das die einfachen Motoren gerne mal das eine oder andere Ampere Strom mehr haben möchten.
Im nächsten Test habe ich die "billig" Motoren (BL-1510) genommen um den Verbrauch in Abhängigkeit zum Gewicht zu ermitteln.
Dazu entstand die 1. Evolutionsstufe des Rahmens:
Der Rahmen ist aus Flugzeugsperrholz (Birke) ausgelasert. Die Entscheidung zum FZ-Sperrholz steht und fällt mit dem Gewicht und der Bauform. Ich wollte einen Rahmen haben der nach was aussieht, ich möchte weder Regler noch Steuerung sehen, das ganze Kabelgewirr soll verschwinden. Carbon wiegt 1,55g/cm³, Flugzeugsperrholz wiegt die Hälfte. Wenn ich also 1,5 mm FZ-Sperrholz nehme müsste ich um auf's gleiche Gewicht zu kommen 0,75er Carbon nehmen .. Da ich aber ein Rahmen zum kleben baue mit Zapfen und Löchern ist ein Fräser von 0,75 mm nötig ... das ist mir einfach zu klein
. Ich habe einen "Zerbrechtest" am Sperrholz Arm durchgeführt da waren ca. 7 kg nötig um ihn abzuknicken ... also was soll's FZ-Sperrholz ist 100% ausreichend.
Naja und preiswerter ist es ausserdem.
Hier also die Schwebedaten vom miniHEX:
Durchgeführt mit den GWS 5030x3 Luftschrauben und den BL-1510 Motoren, Regler sind TURNIGY Plush 6A Steuerung zum Test nanoWii.
Zu guter letzt und um das Bild zu vervollständigen auch noch der Test verschiedener Luftschrauben an einem Motor. Dabei kommt wieder der BL-1510 zum Einsatz.
Schon spannend wie sich die GWS 5030x3 als für diese Projekt recht geeignet herausstellt, wenn man die Effizienz betrachtet.
So erste Flugversuche mit dem Copter sind vielversprechend ... er liegt super in der Luft, keine nennenswerte Vibrationen ... Bleibt in der Halle auf der Stelle stehen ... Ohne GPS ... fast eine Ewigkeit bis er anfängt zu driften.
Zuletzt bearbeitet:


