
Klappbarer Baumarkt-H-Quadcopter (Update 12.06.2013)
Hallo FPV-Freunde,
ich habe vor einer guten Woche bei einem Spontankauf 4 1130kV Motoren mit Reglern erstanden (http://fpv-community.de/showthread.php?24374-4x-20A-Regler-m-SimonK-4-x-Keda-20-26M-1130kV-Motor). Da ich schon seit Längerem mit der Quadcopter-Fliegerei liebäugle habe ich mich um Ostern nun mit dem Bau eines einfachen Quadcopter-Frames beschäftigt, mit dem ich hoffentlich als totaler Newbie in den Multirotorflug einsteigen kann.
Zu meinem Hintergrund: Ich fliege seit nun ca. 5 Jahren mehr oder weniger regelmäßig Fläche und bin dieses Jahr auch in die FPV-Fliegerei eingestiegen. Da ich gerne Bild- und Videoaufnahmen von der Natur und Sportereignissen machen würde kam mir schon seit längerem der Gedanke einen Quadcopter zuzulegen. Ich habe jedoch bisher immer die Investition auf Grund des Preises gescheut. Außerdem bin ich noch nie einen Drehflüger bis auf ein paar Koaxialhelis geflogen.
Die Anforderungen an das Fluggerät habe ich folgendermaßen gestellt:
- günstiger Frame (Abstürze sind wohl kaum zu vermeiden ;-) )
- widerstandsfähig
- portabel
- FPV-fähig
Inspiriert vom H-Quad von Flitetest(http://flitetest.com/articles/H_Quad_Scratch_Build) habe ich dann erste Entwürfe gemacht, die dem Design ähneln. An einigen Stellen habe ich jedoch Abwandlungen gemacht um meinen Ansprüchen gerecht zu werden. Ich habe versucht, die Materialien soweit wie möglich auf dem lokalen Baumarkt zu beziehen um problemlos an Ersatzteile zu kommen und den Preis niedrig zu halten.
Eingekauft habe ich bisher:
- 12x12 Kantholz
- 15x15 Balsa-Kantholz
- 1.8mm Pressspanplatte
- 2x30mm Flachaluminium
- Diverse Schrauben, Muttern und Unterlegscheiben
- 80mm Kunststoffkugel aus dem Bastelladen
Hardware steht folgender zur Verfügung:
- 4x 20A Regler mit SimonK-Firmware
- 4x Keda 20-26M 1130kV Motoren
- Hobbyking I86L-Flightcontoller (für 15€ erstanden)
- Hobbyking KK2.0 Board V1.5
- Hobbyking 9x4.7 Slowfly-Props
- Spektrum DX6i mit kleinem Empfänger
- 3S 2200mAh LiPo
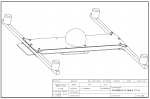
Technische Zeichnungen:
Anhang anzeigen Foldable_H-Quad_V1.5.pdf
KK2.0 PI-Werte
Roll:
P Gain: 50
P Limit: 100
I Gain: 20
I Limit: 20
Pitch:
P Gain: 60
P Limit: 100
I Gain: 20
I Limit: 20
Yaw:
P Gain: 40
P Limit: 20
I Gain: 50
I Limit: 10
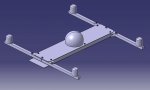
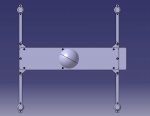
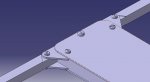
Ich habe einen Klappmechanismus eingebaut, dass ich das Fluggerät einerseits im Rucksack verstauen kann, andererseits bei einem Absturz das Wegklappen eines Armes einen Teil der Energie aufnehmen kann bzw. bei einem Bruch das Teil schnell auszuwechseln ist. Dazu sind die Arme an einem Gelenkpunkt zwischen zwei Aluminiumplatten gelagert sowie in der Mitte mit einem Ausbrechmechanismus gehalten. Die Arme werden einerseits durch die Klemmung mit den Schrauben in Position gehalten außerdem durch die Schraube in der Mitte zusätzlich formschlüssig gesichert. Bei Überbelastung auf die Arme soll es möglich sein, dass die Nasen abscheren können. Ob das funktioniert weiß ich im Moment noch nicht, werde ich aber sicher bald beobachten können") Ein Landegestell werde ich aus Kabelbindern entwerfen. für die genaue Ausführung muss ich aber noch warten, bis ich die Arme auf die passende Länge absägen kann. Hier ein paar Bilder des Klappmechanismus:
Ein Landegestell werde ich aus Kabelbindern entwerfen. für die genaue Ausführung muss ich aber noch warten, bis ich die Arme auf die passende Länge absägen kann. Hier ein paar Bilder des Klappmechanismus:
EDIT:Mittlerweile habe ich die Ausleger kürzer gemacht, sodass sie nicht mehr formschlüssig durch die Schraube in der mitte gehalten werden. Dadurch gehen weniger Arme beim Crash kaputt. Alleine schon durch die Reibung halten diese nämlich wunderbar.

Der Durchmesser auf dem die Motoren sitzen beträgt 550mm. Mit der momentanen Konfiguration hoffe ich auch noch problemlos eine Gopro vorn befestigen zu können um später FPV fliegen zu können. Flugzeit sollte sich hoffentlich bei ca. 10min einpendeln. Sehr gespannt bin ich auf den Flightcontroller von Hobbyking, über den ich kaum etwas finden konnte. Grundsätzlich funktionieren tut er, ob er ein stabiles und anfängerfreundliches Fliegen erlaubt wird sich zeigen.
Momentan warte ich nur noch darauf, dass ich die Motoren zugesendet bekomme. Der Rahmen ist aufgebaut und wiegt ca. 300g. Bilder davon werde ich später noch posten.
Für mich als Neueinsteiger stellen sich jedoch noch ein paar Fragen:
- Wo sollte der Schwerpunkt des Kopters denn liegen?
- Welche Tipps würdet ihr mir für den Erstflug geben?
- Soll ich die Gain-Parameter an den Gyroskopen anfangs auf 50% oder eher niedriger einstellen?
- Wie sieht es beim Quadrokopter-Flug mit Expos bei der Steuerung aus? Wird dies eingesetzt oder ist das eher unüblich?
Sobald der Quadcopter fliegt und die ersten Kinderkrankheiten ausgemerzt sind werde ich die technischen Zeichnungen der Teile veröffentlichen.
Update 07.04.2013:
Hier sind ein paar Bilder von fertig gebauten Frame. Auf den Bildern kann man schön die Kunststoffkugel erkennen, die die Elektronik hält. Außerdem ist der Klettriemer zu sehen, der den Akku unter dem Quad in Position hält. Vom Anfassen her kann ich im Moment sagen, dass der Rahmen sehr steif ist und ich mir überlege, ob ich überhaupt die beiden Platten verklebe.
Momentanes Gewicht mit Regler, Kabel & Akku: 570g



Update 11.04.2013:
Nachdem gestern endlich Motoren und Regler gekommen sind habe ich die halbe Nacht und den Vormittag damit verbracht den Quad flugfertig zu machen. Hier das Ergebnis:



Endgewicht: 975g (Komplett mit Akku)
Es sind noch ein paar kleinere Arbeiten zu machen aber der Copter fliegt! Ich konnte es nicht lassen schon zwei Akkuladungen in unserem kleinen Wohnzimmer zu verfliegen. Anfangs ging es noch nicht so gut, aber dann auch mit gewuchteten Propellern konnte ich auch schon ein Weilchen auf kleinem Raum hovern. Von den gekauften Motoren war einer leider gebraucht und hat anscheinend ausgeschlagene Lager. Da muss ich mir mal überlegen wo ich Ersatz dafür bekommen kann. Leider musste ich auf Grund von Platzknappheit den Empfänger auch nach draußen legen. Achja, wundert euch nicht darüber, dass nur ein Propeller vorn grün ist. Irgendwie hab' ich bei Hobbyking statt der 9x4.7 eine Packung 10x4.5 bestellt...
Sobald das Wetter besser wird werde ich mich mal auf ne große Wiese wagen und den ersten richtigen Testflug machen.
Update 11.04.2013 (19Uhr):
Nun war es heute doch noch (zumindest von oben her) trocken und windstill weshalb ich auf die Wiese gegangen bin und zwei Testflüge gemacht habe, was grundsätzlich sehr gut lief. Beim ersten mal bin ich ca. 10min geflogen und hab knapp 60% vom Akku aufgebraucht, was eigentlich eine ganz respektable Zeit ist. Naja, bei der letzten Platzrunde hab ich den Quadcopter dann doch noch im Matsch versenkt wobei zwei Kabelbinder-Landegestelle abgebrochen sind und ein Arm weggeknickt ist. Alles halb so schlimm. Hab' dann die Schäden repariert, den Akku neu geladen und bin wieder raus aufs Feld. War dann irgendwann wieder etwas zu übermütig und hab nochmals ne ganz ordentliche Bruchlandung im Acker gemacht. Dabei sind zwei Propeller über den Jordan gegangen und wieder ein Arm weggeknickt. Dies zeigt jedoch, dass mein Ansatz mit den geklemmten Armen funktioniert. Bei den neuen, die ich machen werde lass' ich aber vermutlich die halbe Bohrung in der Mitte weg(siehe CAD Schnittbild), dass bei einer Bruchlandung die Nasen an den Armen nicht abbrechen. Somit ein ganz erfolgreicher Tag!


Update 12.06.2013 (19Uhr):
So, nun endlich wieder ein Update von meiner Seite. Mittlerweile fliege seit gut zwei Monaten mit der Kiste und bin wirklich äußerst zufrieden damit. Alleine der Robuste Aufbau macht den Copter äußerst Anfängerfreundlich! Ich bin so oft gecrasht mittlerweile und das auch manchmal richtig hart, wobei meistens nur ein Arm eingeknickt ist und vielleicht mal ein Prop das Zeitliche gesegnet hat. Sonntag habe ich dann bei einer Rolle oben und unten verwechselt und bin dann leider so hart gelandet, dass auch ein bisschen mehr kaputt gegangen ist (sieht Bilder unten).
Gewechselt habe ich mittlerweile das Control Board gegen ein KK2.0 und muss sagen, dass sie paar Euro mehr sowas von gut investiert sind! Die einfache Einstellbarkeit und die Features sind einfach gigantisch. Speziell begeistert bin ich von der Autolevel Funktion, die ja sowas von gut funktioniert! Ich kann das Ding aus der Hand hochwerfen, Vollgas geben und schon steht es Wagerecht in der Luft.
Die Probleme mit den Motoraussetzern sind nun wohl auch passé. Der Grund war wohl ein schlechter Goldkontaktstecker (nein, nicht die Lötstelle). Ich habe den Bösewicht mittlerweile zusammen mit den anderen gegen 2mm Stecker getauscht, die für die Ströme vollkommen ausreichen und meiner Meinung nach auch besser halten.
Zeichnungen: Nachdem ich nun die Kinderkrankheiten ausgemerzt habe sind nun Zeichnungen von mir erstellt worden für alle, die auch einen ähnlichen H-Quadrocopter bauen wollen.
DOWNLOAD
Anhang anzeigen Foldable_H-Quad_V1.5.pdf
Nach hartem Crash:


Panorama mit Keycam #16:

FPV-Impression:

http://www.youtube.com/watch?v=Q7kNv20ZqBU&feature=youtu.be
Grüße aus dem Süden
Stefan
Hallo FPV-Freunde,
ich habe vor einer guten Woche bei einem Spontankauf 4 1130kV Motoren mit Reglern erstanden (http://fpv-community.de/showthread.php?24374-4x-20A-Regler-m-SimonK-4-x-Keda-20-26M-1130kV-Motor). Da ich schon seit Längerem mit der Quadcopter-Fliegerei liebäugle habe ich mich um Ostern nun mit dem Bau eines einfachen Quadcopter-Frames beschäftigt, mit dem ich hoffentlich als totaler Newbie in den Multirotorflug einsteigen kann.
Zu meinem Hintergrund: Ich fliege seit nun ca. 5 Jahren mehr oder weniger regelmäßig Fläche und bin dieses Jahr auch in die FPV-Fliegerei eingestiegen. Da ich gerne Bild- und Videoaufnahmen von der Natur und Sportereignissen machen würde kam mir schon seit längerem der Gedanke einen Quadcopter zuzulegen. Ich habe jedoch bisher immer die Investition auf Grund des Preises gescheut. Außerdem bin ich noch nie einen Drehflüger bis auf ein paar Koaxialhelis geflogen.
Die Anforderungen an das Fluggerät habe ich folgendermaßen gestellt:
- günstiger Frame (Abstürze sind wohl kaum zu vermeiden ;-) )
- widerstandsfähig
- portabel
- FPV-fähig
Inspiriert vom H-Quad von Flitetest(http://flitetest.com/articles/H_Quad_Scratch_Build) habe ich dann erste Entwürfe gemacht, die dem Design ähneln. An einigen Stellen habe ich jedoch Abwandlungen gemacht um meinen Ansprüchen gerecht zu werden. Ich habe versucht, die Materialien soweit wie möglich auf dem lokalen Baumarkt zu beziehen um problemlos an Ersatzteile zu kommen und den Preis niedrig zu halten.
Eingekauft habe ich bisher:
- 12x12 Kantholz
- 15x15 Balsa-Kantholz
- 1.8mm Pressspanplatte
- 2x30mm Flachaluminium
- Diverse Schrauben, Muttern und Unterlegscheiben
- 80mm Kunststoffkugel aus dem Bastelladen
Hardware steht folgender zur Verfügung:
- 4x 20A Regler mit SimonK-Firmware
- 4x Keda 20-26M 1130kV Motoren
- Hobbyking I86L-Flightcontoller (für 15€ erstanden)
- Hobbyking KK2.0 Board V1.5
- Hobbyking 9x4.7 Slowfly-Props
- Spektrum DX6i mit kleinem Empfänger
- 3S 2200mAh LiPo
Technische Zeichnungen:
Anhang anzeigen Foldable_H-Quad_V1.5.pdf
KK2.0 PI-Werte
Roll:
P Gain: 50
P Limit: 100
I Gain: 20
I Limit: 20
Pitch:
P Gain: 60
P Limit: 100
I Gain: 20
I Limit: 20
Yaw:
P Gain: 40
P Limit: 20
I Gain: 50
I Limit: 10
Ich habe einen Klappmechanismus eingebaut, dass ich das Fluggerät einerseits im Rucksack verstauen kann, andererseits bei einem Absturz das Wegklappen eines Armes einen Teil der Energie aufnehmen kann bzw. bei einem Bruch das Teil schnell auszuwechseln ist. Dazu sind die Arme an einem Gelenkpunkt zwischen zwei Aluminiumplatten gelagert sowie in der Mitte mit einem Ausbrechmechanismus gehalten. Die Arme werden einerseits durch die Klemmung mit den Schrauben in Position gehalten außerdem durch die Schraube in der Mitte zusätzlich formschlüssig gesichert. Bei Überbelastung auf die Arme soll es möglich sein, dass die Nasen abscheren können. Ob das funktioniert weiß ich im Moment noch nicht, werde ich aber sicher bald beobachten können
Ein Landegestell werde ich aus Kabelbindern entwerfen. für die genaue Ausführung muss ich aber noch warten, bis ich die Arme auf die passende Länge absägen kann. Hier ein paar Bilder des Klappmechanismus:EDIT:Mittlerweile habe ich die Ausleger kürzer gemacht, sodass sie nicht mehr formschlüssig durch die Schraube in der mitte gehalten werden. Dadurch gehen weniger Arme beim Crash kaputt. Alleine schon durch die Reibung halten diese nämlich wunderbar.
Der Durchmesser auf dem die Motoren sitzen beträgt 550mm. Mit der momentanen Konfiguration hoffe ich auch noch problemlos eine Gopro vorn befestigen zu können um später FPV fliegen zu können. Flugzeit sollte sich hoffentlich bei ca. 10min einpendeln. Sehr gespannt bin ich auf den Flightcontroller von Hobbyking, über den ich kaum etwas finden konnte. Grundsätzlich funktionieren tut er, ob er ein stabiles und anfängerfreundliches Fliegen erlaubt wird sich zeigen.
Momentan warte ich nur noch darauf, dass ich die Motoren zugesendet bekomme. Der Rahmen ist aufgebaut und wiegt ca. 300g. Bilder davon werde ich später noch posten.
Für mich als Neueinsteiger stellen sich jedoch noch ein paar Fragen:
- Wo sollte der Schwerpunkt des Kopters denn liegen?
- Welche Tipps würdet ihr mir für den Erstflug geben?
- Soll ich die Gain-Parameter an den Gyroskopen anfangs auf 50% oder eher niedriger einstellen?
- Wie sieht es beim Quadrokopter-Flug mit Expos bei der Steuerung aus? Wird dies eingesetzt oder ist das eher unüblich?
Sobald der Quadcopter fliegt und die ersten Kinderkrankheiten ausgemerzt sind werde ich die technischen Zeichnungen der Teile veröffentlichen.
Update 07.04.2013:
Hier sind ein paar Bilder von fertig gebauten Frame. Auf den Bildern kann man schön die Kunststoffkugel erkennen, die die Elektronik hält. Außerdem ist der Klettriemer zu sehen, der den Akku unter dem Quad in Position hält. Vom Anfassen her kann ich im Moment sagen, dass der Rahmen sehr steif ist und ich mir überlege, ob ich überhaupt die beiden Platten verklebe.
Momentanes Gewicht mit Regler, Kabel & Akku: 570g
Update 11.04.2013:
Nachdem gestern endlich Motoren und Regler gekommen sind habe ich die halbe Nacht und den Vormittag damit verbracht den Quad flugfertig zu machen. Hier das Ergebnis:
Endgewicht: 975g (Komplett mit Akku)
Es sind noch ein paar kleinere Arbeiten zu machen aber der Copter fliegt! Ich konnte es nicht lassen schon zwei Akkuladungen in unserem kleinen Wohnzimmer zu verfliegen. Anfangs ging es noch nicht so gut, aber dann auch mit gewuchteten Propellern konnte ich auch schon ein Weilchen auf kleinem Raum hovern. Von den gekauften Motoren war einer leider gebraucht und hat anscheinend ausgeschlagene Lager. Da muss ich mir mal überlegen wo ich Ersatz dafür bekommen kann. Leider musste ich auf Grund von Platzknappheit den Empfänger auch nach draußen legen. Achja, wundert euch nicht darüber, dass nur ein Propeller vorn grün ist. Irgendwie hab' ich bei Hobbyking statt der 9x4.7 eine Packung 10x4.5 bestellt...
Sobald das Wetter besser wird werde ich mich mal auf ne große Wiese wagen und den ersten richtigen Testflug machen.
Update 11.04.2013 (19Uhr):
Nun war es heute doch noch (zumindest von oben her) trocken und windstill weshalb ich auf die Wiese gegangen bin und zwei Testflüge gemacht habe, was grundsätzlich sehr gut lief. Beim ersten mal bin ich ca. 10min geflogen und hab knapp 60% vom Akku aufgebraucht, was eigentlich eine ganz respektable Zeit ist. Naja, bei der letzten Platzrunde hab ich den Quadcopter dann doch noch im Matsch versenkt wobei zwei Kabelbinder-Landegestelle abgebrochen sind und ein Arm weggeknickt ist. Alles halb so schlimm. Hab' dann die Schäden repariert, den Akku neu geladen und bin wieder raus aufs Feld. War dann irgendwann wieder etwas zu übermütig und hab nochmals ne ganz ordentliche Bruchlandung im Acker gemacht. Dabei sind zwei Propeller über den Jordan gegangen und wieder ein Arm weggeknickt. Dies zeigt jedoch, dass mein Ansatz mit den geklemmten Armen funktioniert. Bei den neuen, die ich machen werde lass' ich aber vermutlich die halbe Bohrung in der Mitte weg(siehe CAD Schnittbild), dass bei einer Bruchlandung die Nasen an den Armen nicht abbrechen. Somit ein ganz erfolgreicher Tag!
Update 12.06.2013 (19Uhr):
So, nun endlich wieder ein Update von meiner Seite. Mittlerweile fliege seit gut zwei Monaten mit der Kiste und bin wirklich äußerst zufrieden damit. Alleine der Robuste Aufbau macht den Copter äußerst Anfängerfreundlich! Ich bin so oft gecrasht mittlerweile und das auch manchmal richtig hart, wobei meistens nur ein Arm eingeknickt ist und vielleicht mal ein Prop das Zeitliche gesegnet hat. Sonntag habe ich dann bei einer Rolle oben und unten verwechselt und bin dann leider so hart gelandet, dass auch ein bisschen mehr kaputt gegangen ist (sieht Bilder unten).
Gewechselt habe ich mittlerweile das Control Board gegen ein KK2.0 und muss sagen, dass sie paar Euro mehr sowas von gut investiert sind! Die einfache Einstellbarkeit und die Features sind einfach gigantisch. Speziell begeistert bin ich von der Autolevel Funktion, die ja sowas von gut funktioniert! Ich kann das Ding aus der Hand hochwerfen, Vollgas geben und schon steht es Wagerecht in der Luft.
Die Probleme mit den Motoraussetzern sind nun wohl auch passé. Der Grund war wohl ein schlechter Goldkontaktstecker (nein, nicht die Lötstelle). Ich habe den Bösewicht mittlerweile zusammen mit den anderen gegen 2mm Stecker getauscht, die für die Ströme vollkommen ausreichen und meiner Meinung nach auch besser halten.
Zeichnungen: Nachdem ich nun die Kinderkrankheiten ausgemerzt habe sind nun Zeichnungen von mir erstellt worden für alle, die auch einen ähnlichen H-Quadrocopter bauen wollen.
DOWNLOAD
Anhang anzeigen Foldable_H-Quad_V1.5.pdf
Nach hartem Crash:
Panorama mit Keycam #16:
FPV-Impression:
http://www.youtube.com/watch?v=Q7kNv20ZqBU&feature=youtu.be
Grüße aus dem Süden
Stefan
Zuletzt bearbeitet:




