Hier wird über den Bau und die Weiterentwicklung meines neuen Spielzeugs berichtet. Es geht um einen FPV-Tricopter mit unter 600g Abfluggewicht, aufgebaut auf einem selbst entwickelten und gefrästen Frame aus GFK und Aluprofil, geflogen mit 8" Propellern und gesteuert von einer Flyduino MW32.
Entwurf
Die Idee kam mir schon lange her in den Kopf - neben dem recht großen und schweren Black Widow Quad wollte ich noch ein kompakteres, schnelleres FPV-Spielzeug haben. Dabei fand ich das Konzept eines Tricopters schon immer interessant, gerade das Flugverhalten mit schnelleren und genaueren Yaw-Reaktionen gefiel mir sehr. Deshalb habe ich mich mal wieder an LibreCAD gesetzt, das folgende kam dabei raus:

Hier sind 8" Propeller reingezeichnet. In der Mitte sind Montagelöcher für eine FC im 35x35mm Format (NanoWii, Naze32/MW32) eingezeichnet, oben ein Halter für die Sony 600TVL FPV Kamera - auf die gleiche Art habe ich die Cam an meiner BW befestigt, das hat dort super funktioniert, daher verwende ich die Idee einwach wieder. Vor der FC ist Platz für den Videosender vorgesehen, zwischen den Frameplatten wird ein MinimOSD untergebracht.
Die Tri-Mechanik will ich analog zu RCExplorer lösen, mit den Plastikschellen fürs Landegestell von HobbyKing. Ein HXT900 Servo liegt auch schon hier, hoffentlich reicht von dem die Geschwindigkeit und Genauigkeit - wenn nicht, muss ein besseres her.
Erste Versuche
Zuerst wollte ich den Frame mit 7" Propellern und kleinen Motoren von Hobbyking aufbauen. Ich hatte allerdings Bedenken, da nirgendwo verlässliche Schubdaten zu den Motoren zu finden waren (Turnigy 2204-14T), und die integrierten Propsaver mir Bedenken gegeben haben. Daher habe ich mir einfach einen Motor und ein Paar Propeller (7" in 2- und 3-Blatt) von HK bestellt und auf eine höchst wissenschaftliche Art und Weise experimentiert:

Die Ergebnisse waren nicht zufriedenstellend. Zum einen war der Schub mit knapp unter 300g nicht ausreichend. Zum anderen wurde der Motor mit 7" Props auf 3S sehr schnell recht warm. Und zuletzt sind die Propsaver für nichts zu gebrauchen, zumindest auf einem Copter würde ich den auf keinen Fall vertrauen.
Die winzigen Turnigys aus dem Spiel, habe ich mich auf die einfachste Alternative beschlossen: 1100kv Suppos 2208 von Flyduino, mit 8" Propellern. Dazu 12A Blue Series ESCs, die ich mit SimonK flashe. Die Kombination sollte knapp an 500g Schub pro Motor geben, was bei einem Abfluggewicht des Copters von knapp 600g mehr als genug sein sollte. Das alles habe ich mir dann auch bestellt, und mich an den nächsten Schritt gemacht - den Frame zu fräsen und zusammenzubauen.
Baubericht
Die Frameplatten habe ich aus 1.5mm starkem GFK im L1A Makerspace in Darmstadt auf deren Fräse gefräst. Hat auch vom 2. Anlauf super funktioniert, sobald man den in der Software ausgewählten Fräser auch tatsächlich eingesetzt hat


Den Aluprofil habe ich dann auch direkt dort verarbeitet, schon praktisch mit einem Bohrstand anstatt Dremel arbeiten zu können. So sahen die Frameteile dann fertig aus:

Zusammengeschraubt und die MW32 mit der Abdeckung von meister draufgesetzt:

Und die restlichen Komponenten die schon da sind verbaut: Sony 600TVL Kamera, 25mw Iftron Nano Stinger mit rabe2000's CL-Antenne, GR-16 und provisorisch einen 3S 2200 druntergehängt.


Gesamtgewicht soweit - 360g (inkl. draufgelegtem Ublox GPS). Fehlen noch Motoren und Regler, sowie der MinimOSD, und die Tri-Tiltmechanik. Sollte also mit 550-600g ganz gut hinhauen.
Update 20.09.13
Die Regler von HK sind angekommen und mit SimonK geflasht worden. Warte noch auf die Motoren, bis ich den Kabelbaum löte und verbaue.
Update 21.09.13
Obwohl die Tri-Mechanik immer noch fehlt, habe ich mich nicht davon abhalten können, den Rest komplett zusammenzubauen Die Motoren und Props von Flyduino kamen heute früh an, also habe ich mich direkt ans Basteln gesetzt:
Motoren mit den ESCs verlötet und an den vorderen Querträger angeschraubt:

Elektronik oben auf dem Frame platziert:

... und das dazugehörige Kabelgewirr unten drunter:

Stromkabel alle ausfindig gemacht und in den XT60 Stecker reingelötet. Großer Vorteil von 3S - man kann alles direkt anschließen: der Videosender und die Kamera laufen beide mit 12V, und der MW32 hat einen Spannungsmessanschluss, wo ebenfalls direkt 3S drauf kann.

Und so schaut's nun aus, nahezu fertig:

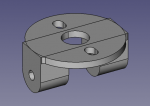
Das Gewicht liegt so wie er da steht, inklusive einen 3S 2200 LiPo bei 560g. Mit der Trimechanik werden's also knapp 600 werden, so wie geplant. Die Trimechanik wird dann so aussehen:
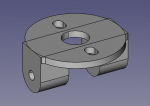
Inspiriert von RCExplorer, allerdings mit einem integrierten Motormount mit 16-19mm M3 Langlöchern und M3 Montagelöchern am unteren Teil, damit's am Ausleger verschraubt werden kann. Angetrieben wird's vom Servo direkt über einen angeschraubten Servokreuz.
Update 22.09.2013
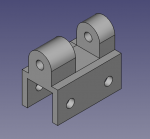
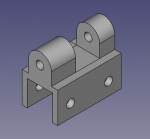
Mechanik gedruckt, versucht zusammenzubauen, CAD Dateien leicht geändert und wieder gedruckt - dann hat's alles gepasst So sieht's aus:

Die Mechanik funktioniert wunderbar. Die Löcher musste man alle nochmal nachbohren (per Hand), und die Flächen wo die Teile anliegen mit einer Feile feinschleifen - aber wenn das erledigt ist, passt alles super. Der Servohorn ist mit zwei Schrauben befestigt und an den Seiten abgeschnitten. Mit zwei Befestigungsschrauben und einem 3mm CFK-Stab als Achse wiegt die Mechanik gerade mal 10g, und wirkt ziemlich stabil.



571g Abfluggewicht, Schwebt bei ~40% Schub, fliegt sich sehr angenehm wenn ich die PID Werte erstmal ein wenig in den Griff bekommen habe. Habe mich sogar getraut, ein Paar Flips und Rollen auszuprobieren - dabei ist mir der Copter fast gegen einen Baum geknallt, weil ich die Orientierung in Acro verloren habe, aber zum Glück schnell genug Angle reingehauen, das hat ihn unter Kontrolle gebracht.
FPV auch gleich angetestet, geht gut - nur dass ich beim Umstecken des Akkus die veränderten PID Werte verloren habe, weil vergessen, in KV-Team-OSD auf "Write to EEPROM" zu gehen... im Video sieht man das noch etwas zittrige Flugverhalten mit den nicht angepassten PIDs:
http://www.youtube.com/watch?v=MJ2gwM7fYd4
Das OSD hat auch nicht 100% funktioniert, manche Elemente reagieren nicht (Flugmodus, Disarmed Anzeige, Geschwindigkeit) - denke dass daran liegt, dass die aktuelle KV-Team-OSD für Multiwii 2.2 ausgelegt ist, und die Harakiri Firmware nur das Protokoll von 2.1 ausgibt. Werde mal eine ältere Version vom OSD aufspielen und testen.
Entwurf
Die Idee kam mir schon lange her in den Kopf - neben dem recht großen und schweren Black Widow Quad wollte ich noch ein kompakteres, schnelleres FPV-Spielzeug haben. Dabei fand ich das Konzept eines Tricopters schon immer interessant, gerade das Flugverhalten mit schnelleren und genaueren Yaw-Reaktionen gefiel mir sehr. Deshalb habe ich mich mal wieder an LibreCAD gesetzt, das folgende kam dabei raus:
Hier sind 8" Propeller reingezeichnet. In der Mitte sind Montagelöcher für eine FC im 35x35mm Format (NanoWii, Naze32/MW32) eingezeichnet, oben ein Halter für die Sony 600TVL FPV Kamera - auf die gleiche Art habe ich die Cam an meiner BW befestigt, das hat dort super funktioniert, daher verwende ich die Idee einwach wieder. Vor der FC ist Platz für den Videosender vorgesehen, zwischen den Frameplatten wird ein MinimOSD untergebracht.
Die Tri-Mechanik will ich analog zu RCExplorer lösen, mit den Plastikschellen fürs Landegestell von HobbyKing. Ein HXT900 Servo liegt auch schon hier, hoffentlich reicht von dem die Geschwindigkeit und Genauigkeit - wenn nicht, muss ein besseres her.
Erste Versuche
Zuerst wollte ich den Frame mit 7" Propellern und kleinen Motoren von Hobbyking aufbauen. Ich hatte allerdings Bedenken, da nirgendwo verlässliche Schubdaten zu den Motoren zu finden waren (Turnigy 2204-14T), und die integrierten Propsaver mir Bedenken gegeben haben. Daher habe ich mir einfach einen Motor und ein Paar Propeller (7" in 2- und 3-Blatt) von HK bestellt und auf eine höchst wissenschaftliche Art und Weise experimentiert:
Die Ergebnisse waren nicht zufriedenstellend. Zum einen war der Schub mit knapp unter 300g nicht ausreichend. Zum anderen wurde der Motor mit 7" Props auf 3S sehr schnell recht warm. Und zuletzt sind die Propsaver für nichts zu gebrauchen, zumindest auf einem Copter würde ich den auf keinen Fall vertrauen.
Die winzigen Turnigys aus dem Spiel, habe ich mich auf die einfachste Alternative beschlossen: 1100kv Suppos 2208 von Flyduino, mit 8" Propellern. Dazu 12A Blue Series ESCs, die ich mit SimonK flashe. Die Kombination sollte knapp an 500g Schub pro Motor geben, was bei einem Abfluggewicht des Copters von knapp 600g mehr als genug sein sollte. Das alles habe ich mir dann auch bestellt, und mich an den nächsten Schritt gemacht - den Frame zu fräsen und zusammenzubauen.
Baubericht
Die Frameplatten habe ich aus 1.5mm starkem GFK im L1A Makerspace in Darmstadt auf deren Fräse gefräst. Hat auch vom 2. Anlauf super funktioniert, sobald man den in der Software ausgewählten Fräser auch tatsächlich eingesetzt hat
Den Aluprofil habe ich dann auch direkt dort verarbeitet, schon praktisch mit einem Bohrstand anstatt Dremel arbeiten zu können. So sahen die Frameteile dann fertig aus:
Zusammengeschraubt und die MW32 mit der Abdeckung von meister draufgesetzt:
Und die restlichen Komponenten die schon da sind verbaut: Sony 600TVL Kamera, 25mw Iftron Nano Stinger mit rabe2000's CL-Antenne, GR-16 und provisorisch einen 3S 2200 druntergehängt.
Gesamtgewicht soweit - 360g (inkl. draufgelegtem Ublox GPS). Fehlen noch Motoren und Regler, sowie der MinimOSD, und die Tri-Tiltmechanik. Sollte also mit 550-600g ganz gut hinhauen.
Update 20.09.13
Die Regler von HK sind angekommen und mit SimonK geflasht worden. Warte noch auf die Motoren, bis ich den Kabelbaum löte und verbaue.
Update 21.09.13
Obwohl die Tri-Mechanik immer noch fehlt, habe ich mich nicht davon abhalten können, den Rest komplett zusammenzubauen
Die Motoren und Props von Flyduino kamen heute früh an, also habe ich mich direkt ans Basteln gesetzt:Motoren mit den ESCs verlötet und an den vorderen Querträger angeschraubt:
Elektronik oben auf dem Frame platziert:
... und das dazugehörige Kabelgewirr unten drunter:
Stromkabel alle ausfindig gemacht und in den XT60 Stecker reingelötet. Großer Vorteil von 3S - man kann alles direkt anschließen: der Videosender und die Kamera laufen beide mit 12V, und der MW32 hat einen Spannungsmessanschluss, wo ebenfalls direkt 3S drauf kann.
Und so schaut's nun aus, nahezu fertig:
Das Gewicht liegt so wie er da steht, inklusive einen 3S 2200 LiPo bei 560g. Mit der Trimechanik werden's also knapp 600 werden, so wie geplant. Die Trimechanik wird dann so aussehen:
Inspiriert von RCExplorer, allerdings mit einem integrierten Motormount mit 16-19mm M3 Langlöchern und M3 Montagelöchern am unteren Teil, damit's am Ausleger verschraubt werden kann. Angetrieben wird's vom Servo direkt über einen angeschraubten Servokreuz.
Update 22.09.2013
Mechanik gedruckt, versucht zusammenzubauen, CAD Dateien leicht geändert und wieder gedruckt - dann hat's alles gepasst
So sieht's aus:
Die Mechanik funktioniert wunderbar. Die Löcher musste man alle nochmal nachbohren (per Hand), und die Flächen wo die Teile anliegen mit einer Feile feinschleifen - aber wenn das erledigt ist, passt alles super. Der Servohorn ist mit zwei Schrauben befestigt und an den Seiten abgeschnitten. Mit zwei Befestigungsschrauben und einem 3mm CFK-Stab als Achse wiegt die Mechanik gerade mal 10g, und wirkt ziemlich stabil.
571g Abfluggewicht, Schwebt bei ~40% Schub, fliegt sich sehr angenehm wenn ich die PID Werte erstmal ein wenig in den Griff bekommen habe. Habe mich sogar getraut, ein Paar Flips und Rollen auszuprobieren - dabei ist mir der Copter fast gegen einen Baum geknallt, weil ich die Orientierung in Acro verloren habe
, aber zum Glück schnell genug Angle reingehauen, das hat ihn unter Kontrolle gebracht. FPV auch gleich angetestet, geht gut - nur dass ich beim Umstecken des Akkus die veränderten PID Werte verloren habe, weil vergessen, in KV-Team-OSD auf "Write to EEPROM" zu gehen... im Video sieht man das noch etwas zittrige Flugverhalten mit den nicht angepassten PIDs:
http://www.youtube.com/watch?v=MJ2gwM7fYd4
Das OSD hat auch nicht 100% funktioniert, manche Elemente reagieren nicht (Flugmodus, Disarmed Anzeige, Geschwindigkeit) - denke dass daran liegt, dass die aktuelle KV-Team-OSD für Multiwii 2.2 ausgelegt ist, und die Harakiri Firmware nur das Protokoll von 2.1 ausgibt. Werde mal eine ältere Version vom OSD aufspielen und testen.
Zuletzt bearbeitet: