
Hallo zusammen,
nachdem ich gestern meinen Skyhunter von der Post geholt habe erstelle ich gleich mal einen Baubericht-Thread. Quasi als ansporn das ich mir nicht zu viel Zeit lasse. Spätestens Anfang April muss er fliegen, da ist das FPV Rookie in Kärnten")
8. Jänner 2014
Unboxing, unspektakulär aber ich freue mich trotzdem wie ein Kind


Verpackung ist OK, alles da.


Die Verarbeitung ist ganz gut.



Zum Größenvergleich ein 3S5800 .. der Rumpf ist riesig!


Zwei Bierflaschen passen locker rein!


Der Rumpf hat vorne zwei Lufteinlässe, seitlich ist eine Klappe angedeutet, unten gibt es Griffmulden. Und Decals sind auch dabei
Nächster Schritt: Überlegungen wo welches Equipment verbaut wird und wie. Auf der Liste stehen:
- FPV Cam
- GoPro Hero
- FPV Tx samt CL
- Eagletree OSDPro
- Eagletree eLogger
- Eagletree Airspeed Sensor
- Eagletree Altitude Sensor
- Eagletree Guardian (2-Achs-Stabilisation)
- GPS Sensor
- externes BEC
- Spannungsfilter Marke Eigenbau
- 3 Servos (Emax ES08MD)
- Turnigy 55A Regler
- Turnigy D3542/6 1000kv Motor
- Aeronaut CamCarbon 12x8 Klapplatte
- 180° Servo für die FPV Cam, eventuell auch für die GoPro
- HD Wingcam, nach unten gerichtet, irgendwo im Rumpf versteckt
- 2x 3S 5800 parallel (=3S 11600)
- LED Steuermodul
- Beleuchtung bestehend aus:
- 2x Landescheinwerfer
- 4x Positionslichter (Rot, Grün, Weiß)
- 4x Strobes (Weiß)
- 2x ACL (Anti Collision Lights, Rot)
9. Jänner 2014
Nachdem mir erst jetzt eingefallen ist dass ich nur eine FPV Cam, VTX und Antenne habe (die momentan am Quad hängen) steht der Bau. Somit hab ich mir mal das "Verdrahtungs-Schema" überlegt. Inputs welcome!
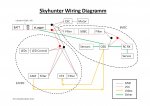
Zur Erklärung: Filter steht für einen LC-Filter nach Blueangel´s Anleitung. Der Rest sollte verständlich sein, hoffe ich..
15. Jänner 2014
Da ich zwei 3S5800 parallel betreiben möchte habe ich mir ein Kabel gebastelt - und nachdem jetzt 40cm mehr Kabel zwischen eLogger/BEC und Akku sind kam ein Kondensator in der Mitte dazu.



Dann habe ich den Drehzahlsensor am ESC eingelötet.

Und nach dem eLogger zwacke ich die 12V für Cam, VTx und BEC ab. Somit misst der eLogger wirklich alles was aus dem Akku enttnommen wird.

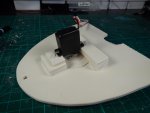
Ich habe mich ewig mit den Positionen der Komponenten gespielt, am Ende ist das originale Holz einem neuen gewichen. Das ist der erste Rohentwurf (alle Kabel werden noch angepasst).
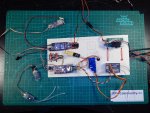

Links sieht man ein paar Sensoren die im Rumpf verbaut werden, oben hängt der 12V Verteiler weg.
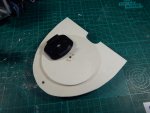
Zu guter letzt habe ich mir überlegt wo VTx und GPS hinsollen - am Bild ist der RC Rx stellvertretend für den VTx. Vermutlich kommt das GPS nun aber doch oben hin.. GoPro und FPV cam werden drehbar auf einem Eigenbaugestell montiert.
Update 16.Feb.14
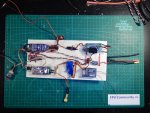
So, nach 4 anstregenden Wochen habe ich endlich doch wieder ein bisschen was am Skyhunter machen können. Die Verkabelung im Rumpf ist fertig:


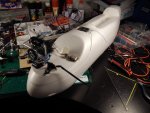
Und ich habe die Kameraplatform fertig. Eigenbau aus Balsa, 180° Servo, somit sind FPV Cam und GoPro jeweils 90° nach links und rechts schwenkbar.


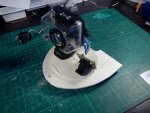
Die GoPro wird aufgeklebt und zusätzlich verschraubt:

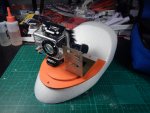
Und orange lackiert:

Dann noch ein Blech als FPV Cam Halterung angepasst:

Und fertig:
Dann noch ein bisschen 2K Kleber verarbeitet und die Kohlestäbe eingeklebt und Kabelkanäle geschnitten:


2. April 2014
Lange update-Pause aus beruflichen und nebenberuflichen Gründen, here we go:
Zuerst habe ich für das Pitot-Rohr ein kleines Kohlerohr als Führung eingeklebt:

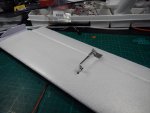
Dann habe ich das Höhenruder-Servo nach oben durchgeführt, da ich vermeiden will dass das Gestänge mal im Gras hängen bleibt:
Dann hab ich gleich die Querruder-Servos eingebaut. Auch hier alles geschraubt und aus Metall:

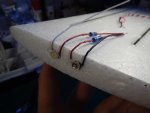
Dann ging es an die LEDs in den Flügeln (Position und Strobes):

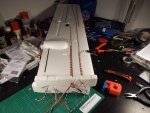
Ganz schöner Kabelsalat der da aus den Wings kommt (3 LEDs, Querruder, Höhenruder durchgeführt, hintere LEDs durchgeführt):
Hier nochmal im Detail: vorher Kabelsalat..

Nachher aufgeräumt dank Sub-D Stecker:


Next step ist Rumpf verkleben und die Gegenstücke zu den Flügel-Steckern verlöten, dann ist er fertig zum lackieren - davor erfolgt vermutlich noch der Erstflug, passenderweise am FPV Rookie am Wochenende.. :S
15.Apr.14
Der Erstflug ist sich nicht ausgegangen, einfach zu viele Baustellen (und Hobbies)..
Weiter gehts mit dem Kabelbaum-Gegenstück im Rumpf, flux wieder mit D-Subs gelöst:

Und zwischendurch was zum Schmunzeln - ein paar Kabelstücke.. und das war nur die Hälfte..

Weiter geht's mit dem Motormount - ich möchte den Motor auch wechseln können und daher musste eine Lösung gefunden werden:



Und dann noch fix den einen Temperatursensor in das rechte Nasenloch gesetzt, der zweite kommt ans ESC.

Update 29.Apr.14
So, nach einem anstrengenden Wochenende auf der Messe Wels hier noch ein paar Bilder - mittlerweile ist der Rumpf verklebt, grundiert, lackiert und fertig beklebt. Das Heck ist ebenso fertig behandelt:







Update 19.Aug.14
Tja, it´s been a while! Zu viele Hobbies und zu wenig Zeit, was soll ich sagen. Geflogen ist er nach wie vor nicht, aber wir sind im Endspurt!
Der Rumpf ist fertig, die Wings sind mittlerweile auch mit Safecoat behandelt, lackiert und beklebt, wieder mit Safecoat behandelt, die Servos verbaut und die Kabel verlegt:




Der Horizontal Stabilizer ist auch fertig, da hat nur noch der Servoeinbau gefehlt:

Nun muss ich mir überlegen, ob ich das Teil zerlegbar machen will oder nicht - Vorkehrungen (Servostecker für alle Verbindungen) habe ich ja getroffen. Ich denke ich werde das Heck mit den Stangen montiert lassen, die Wings nur leicht von den Rohren trennen um sie abwinkeln zu können. So kann ich das Heck wie in Fluglage und die Wings "dazwischen" transportieren.
Next step: Eagle Tree System einstellen, dann kann der Erstflug kommen!
Update 4.Sep.14
Habe neulich mal einen ersten burn-in run gemacht, der Turnigy D3542/6 1000kv tut wie erwartet. Die "Stufen" sind von 25/50/75/100% throttle:




9.Sep.14
Kurz mal die Listen zusammengezählt und eine Übersicht gemacht. Verbraten hat der Bau:
- 3,784m Kabel ingesamt
- 75cm Schutznetz
- 450g SafeCoat
- 53,9h Arbeit
- 10 Paar Goldies
- 12 LEDs
- 3 Induktivitäten
- 1 Kondensator
Verbaut wurden wie schon eingangs erwähnt:
- FPV Cam (Sony 600TVL)
- GoPro Hero3+ BE
- FPV Tx 5G8 25mW samt CL
- Eagletree OSDPro
- Eagletree eLogger
- Eagletree Airspeed Sensor
- Eagletree Altitude Sensor
- Eagletree Guardian (2-Achs-Stabilisation)
- GPS Sensor
- externes BEC (Turnigy 5A)
- Spannungsfilter Marke Eigenbau für VTx und Cam
- 3 Servos (Emax ES08MD)
- 1 Turnigy 55A Regler
- 1 Turnigy D3542/6 1000kv Motor
- Aeronaut CamCarbon 12x8 Klapplatte
- 180° MG Servo für die Kameraplatform
- 2x 3S 5800 parallel (=3S 11600)
- LED Steuermodul für die Beleuchtung (12 LEDs)
Fotos und Erstflug folgen!
nachdem ich gestern meinen Skyhunter von der Post geholt habe erstelle ich gleich mal einen Baubericht-Thread. Quasi als ansporn das ich mir nicht zu viel Zeit lasse. Spätestens Anfang April muss er fliegen, da ist das FPV Rookie in Kärnten
8. Jänner 2014
Unboxing, unspektakulär aber ich freue mich trotzdem wie ein Kind
Verpackung ist OK, alles da.
Die Verarbeitung ist ganz gut.
Zum Größenvergleich ein 3S5800 .. der Rumpf ist riesig!
Zwei Bierflaschen passen locker rein!
Der Rumpf hat vorne zwei Lufteinlässe, seitlich ist eine Klappe angedeutet, unten gibt es Griffmulden. Und Decals sind auch dabei
Nächster Schritt: Überlegungen wo welches Equipment verbaut wird und wie. Auf der Liste stehen:
- FPV Cam
- GoPro Hero
- FPV Tx samt CL
- Eagletree OSDPro
- Eagletree eLogger
- Eagletree Airspeed Sensor
- Eagletree Altitude Sensor
- Eagletree Guardian (2-Achs-Stabilisation)
- GPS Sensor
- externes BEC
- Spannungsfilter Marke Eigenbau
- 3 Servos (Emax ES08MD)
- Turnigy 55A Regler
- Turnigy D3542/6 1000kv Motor
- Aeronaut CamCarbon 12x8 Klapplatte
- 180° Servo für die FPV Cam, eventuell auch für die GoPro
- HD Wingcam, nach unten gerichtet, irgendwo im Rumpf versteckt
- 2x 3S 5800 parallel (=3S 11600)
- LED Steuermodul
- Beleuchtung bestehend aus:
- 2x Landescheinwerfer
- 4x Positionslichter (Rot, Grün, Weiß)
- 4x Strobes (Weiß)
- 2x ACL (Anti Collision Lights, Rot)
9. Jänner 2014
Nachdem mir erst jetzt eingefallen ist dass ich nur eine FPV Cam, VTX und Antenne habe (die momentan am Quad hängen) steht der Bau. Somit hab ich mir mal das "Verdrahtungs-Schema" überlegt. Inputs welcome!
Zur Erklärung: Filter steht für einen LC-Filter nach Blueangel´s Anleitung. Der Rest sollte verständlich sein, hoffe ich..
15. Jänner 2014
Da ich zwei 3S5800 parallel betreiben möchte habe ich mir ein Kabel gebastelt - und nachdem jetzt 40cm mehr Kabel zwischen eLogger/BEC und Akku sind kam ein Kondensator in der Mitte dazu.
Dann habe ich den Drehzahlsensor am ESC eingelötet.
Und nach dem eLogger zwacke ich die 12V für Cam, VTx und BEC ab. Somit misst der eLogger wirklich alles was aus dem Akku enttnommen wird.
Ich habe mich ewig mit den Positionen der Komponenten gespielt, am Ende ist das originale Holz einem neuen gewichen. Das ist der erste Rohentwurf (alle Kabel werden noch angepasst).
Links sieht man ein paar Sensoren die im Rumpf verbaut werden, oben hängt der 12V Verteiler weg.
Zu guter letzt habe ich mir überlegt wo VTx und GPS hinsollen - am Bild ist der RC Rx stellvertretend für den VTx. Vermutlich kommt das GPS nun aber doch oben hin.. GoPro und FPV cam werden drehbar auf einem Eigenbaugestell montiert.
Update 16.Feb.14
So, nach 4 anstregenden Wochen habe ich endlich doch wieder ein bisschen was am Skyhunter machen können. Die Verkabelung im Rumpf ist fertig:
Und ich habe die Kameraplatform fertig. Eigenbau aus Balsa, 180° Servo, somit sind FPV Cam und GoPro jeweils 90° nach links und rechts schwenkbar.
Die GoPro wird aufgeklebt und zusätzlich verschraubt:
Und orange lackiert:
Dann noch ein Blech als FPV Cam Halterung angepasst:
Und fertig:
Dann noch ein bisschen 2K Kleber verarbeitet und die Kohlestäbe eingeklebt und Kabelkanäle geschnitten:
2. April 2014
Lange update-Pause aus beruflichen und nebenberuflichen Gründen, here we go:
Zuerst habe ich für das Pitot-Rohr ein kleines Kohlerohr als Führung eingeklebt:
Dann habe ich das Höhenruder-Servo nach oben durchgeführt, da ich vermeiden will dass das Gestänge mal im Gras hängen bleibt:
Dann hab ich gleich die Querruder-Servos eingebaut. Auch hier alles geschraubt und aus Metall:
Dann ging es an die LEDs in den Flügeln (Position und Strobes):
Ganz schöner Kabelsalat der da aus den Wings kommt (3 LEDs, Querruder, Höhenruder durchgeführt, hintere LEDs durchgeführt):
Hier nochmal im Detail: vorher Kabelsalat..
Nachher aufgeräumt dank Sub-D Stecker:
Next step ist Rumpf verkleben und die Gegenstücke zu den Flügel-Steckern verlöten, dann ist er fertig zum lackieren - davor erfolgt vermutlich noch der Erstflug, passenderweise am FPV Rookie am Wochenende.. :S
15.Apr.14
Der Erstflug ist sich nicht ausgegangen, einfach zu viele Baustellen (und Hobbies)..
Weiter gehts mit dem Kabelbaum-Gegenstück im Rumpf, flux wieder mit D-Subs gelöst:
Und zwischendurch was zum Schmunzeln - ein paar Kabelstücke.. und das war nur die Hälfte..
Weiter geht's mit dem Motormount - ich möchte den Motor auch wechseln können und daher musste eine Lösung gefunden werden:
Und dann noch fix den einen Temperatursensor in das rechte Nasenloch gesetzt, der zweite kommt ans ESC.
Update 29.Apr.14
So, nach einem anstrengenden Wochenende auf der Messe Wels hier noch ein paar Bilder - mittlerweile ist der Rumpf verklebt, grundiert, lackiert und fertig beklebt. Das Heck ist ebenso fertig behandelt:
Update 19.Aug.14
Tja, it´s been a while! Zu viele Hobbies und zu wenig Zeit, was soll ich sagen. Geflogen ist er nach wie vor nicht, aber wir sind im Endspurt!
Der Rumpf ist fertig, die Wings sind mittlerweile auch mit Safecoat behandelt, lackiert und beklebt, wieder mit Safecoat behandelt, die Servos verbaut und die Kabel verlegt:
Der Horizontal Stabilizer ist auch fertig, da hat nur noch der Servoeinbau gefehlt:
Nun muss ich mir überlegen, ob ich das Teil zerlegbar machen will oder nicht - Vorkehrungen (Servostecker für alle Verbindungen) habe ich ja getroffen. Ich denke ich werde das Heck mit den Stangen montiert lassen, die Wings nur leicht von den Rohren trennen um sie abwinkeln zu können. So kann ich das Heck wie in Fluglage und die Wings "dazwischen" transportieren.
Next step: Eagle Tree System einstellen, dann kann der Erstflug kommen!
Update 4.Sep.14
Habe neulich mal einen ersten burn-in run gemacht, der Turnigy D3542/6 1000kv tut wie erwartet. Die "Stufen" sind von 25/50/75/100% throttle:
9.Sep.14
Kurz mal die Listen zusammengezählt und eine Übersicht gemacht. Verbraten hat der Bau:
- 3,784m Kabel ingesamt
- 75cm Schutznetz
- 450g SafeCoat
- 53,9h Arbeit
- 10 Paar Goldies
- 12 LEDs
- 3 Induktivitäten
- 1 Kondensator
Verbaut wurden wie schon eingangs erwähnt:
- FPV Cam (Sony 600TVL)
- GoPro Hero3+ BE
- FPV Tx 5G8 25mW samt CL
- Eagletree OSDPro
- Eagletree eLogger
- Eagletree Airspeed Sensor
- Eagletree Altitude Sensor
- Eagletree Guardian (2-Achs-Stabilisation)
- GPS Sensor
- externes BEC (Turnigy 5A)
- Spannungsfilter Marke Eigenbau für VTx und Cam
- 3 Servos (Emax ES08MD)
- 1 Turnigy 55A Regler
- 1 Turnigy D3542/6 1000kv Motor
- Aeronaut CamCarbon 12x8 Klapplatte
- 180° MG Servo für die Kameraplatform
- 2x 3S 5800 parallel (=3S 11600)
- LED Steuermodul für die Beleuchtung (12 LEDs)
Fotos und Erstflug folgen!
Anhänge
-
 986,4 KB Aufrufe: 56
986,4 KB Aufrufe: 56 -
 1,4 MB Aufrufe: 102
1,4 MB Aufrufe: 102 -
 1,3 MB Aufrufe: 96
1,3 MB Aufrufe: 96 -
 1,2 MB Aufrufe: 89
1,2 MB Aufrufe: 89 -
 1,2 MB Aufrufe: 91
1,2 MB Aufrufe: 91 -
 1,1 MB Aufrufe: 98
1,1 MB Aufrufe: 98
Zuletzt bearbeitet:

