
So, nochmal ein kleines Update, mit tiefer gelegtem Zahnkranz! ")
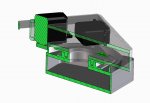


Die Servos können dann weiter nach vorne wandern, sind weiter vom Mag-Sensor weg und der Tilt-Bügel passt (jetzt auch nen bisschen verlängert) über das Pan-Servo!
Das Gehäuse unten ist ein bisschen in der Größe gewachsen, damit der Zahnkranz drauf passt, kann man aber auch anders lösen, dann würde der Zahnkranz nen bisschen über stehen und unter dem Drehteller befestigt werden.
Das Loch in der Mitte wird noch an den Schleifring angepasst!
Schöne Grüße aus dem Sauerland!
Chriss
Die Servos können dann weiter nach vorne wandern, sind weiter vom Mag-Sensor weg und der Tilt-Bügel passt (jetzt auch nen bisschen verlängert) über das Pan-Servo!
Das Gehäuse unten ist ein bisschen in der Größe gewachsen, damit der Zahnkranz drauf passt, kann man aber auch anders lösen, dann würde der Zahnkranz nen bisschen über stehen und unter dem Drehteller befestigt werden.
Das Loch in der Mitte wird noch an den Schleifring angepasst!
Schöne Grüße aus dem Sauerland!
Chriss

