
Hallo
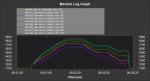
Ich habe ein APM 2.5 und nutze alle 8 Ausgänge für einen Octocopter. Da ich gemerkt habe, dass die Motoren trotz Kalibrierung nicht gleichmäßig im Stand drehen und dies auch auf dem Log zu sehen war, habe ich die Motorversorgung abgehängt und nur die 8 Ausgänge in Abhängigkeit von der Gasstellung geloggt. Auf dem Log sieht man, wie verschieden die Ausgänge laufen.
Ich vermute, dass der APM defekt ist. Kann das jemand bestätigen oder gibt es eine Einstellmöglichkeit.
Gerd
Ich habe ein APM 2.5 und nutze alle 8 Ausgänge für einen Octocopter. Da ich gemerkt habe, dass die Motoren trotz Kalibrierung nicht gleichmäßig im Stand drehen und dies auch auf dem Log zu sehen war, habe ich die Motorversorgung abgehängt und nur die 8 Ausgänge in Abhängigkeit von der Gasstellung geloggt. Auf dem Log sieht man, wie verschieden die Ausgänge laufen.
Ich vermute, dass der APM defekt ist. Kann das jemand bestätigen oder gibt es eine Einstellmöglichkeit.
Gerd
Anhänge
-
 146,2 KB Aufrufe: 17
146,2 KB Aufrufe: 17
") beim motortest sieht man zum beispiel auch, ob die motoren alle mit dem gleichen wert anlaufen.
beim motortest sieht man zum beispiel auch, ob die motoren alle mit dem gleichen wert anlaufen.


