Hallo Kuckkuck,
klar und deutlich wurde meine Aussage bis dahin nicht beantwortet.
Diese Aussage von DIR irritiert mich immer noch. Bei mir und allen anderen hatte Pitch bisher eine andere Wirkrichtung als die anderen Kanäle. Es erstaunt, dass es bei dir anders ist.
Meines Wissens ist diese Kalibriermethode in Kombi mit dem APM falsch.
Gas hoch, Akku an, Akku aus, Akku an,Gas runter....siehe Arducopter Wiki.
MfG Viel Glück
klar und deutlich wurde meine Aussage bis dahin nicht beantwortet.
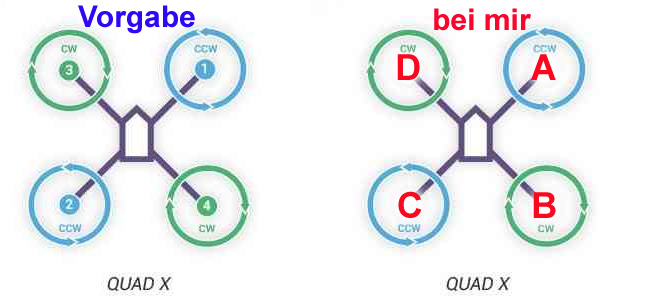
@Hulk Invertiert ist nichts,
Funke an, Gas hoch, Akku an Copter, Pieps abwarten, Akku ab, Akku wieder dran (Gas ist weiter voll auf), Melodie abwarten, Gas runter, Akku ab, beim nächsten Akku anschließen sollte es passen ... ?!
Gas hoch, Akku an, Akku aus, Akku an,Gas runter....siehe Arducopter Wiki.
MfG Viel Glück
Zuletzt bearbeitet:
") Wenn Pitch bei allen invertiert ist, wird das bei mir wohl genauso gewesen sein.
Wenn Pitch bei allen invertiert ist, wird das bei mir wohl genauso gewesen sein.