Uff der letzte Eintrag ist ja echt ewig her
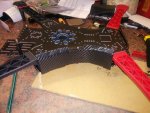
Die Hardware steht soweit fertig und arbeitet mit Multiwii 2.4 auf einen Arduino Mega 2560 (vorallem wegen dergrösse des Speicherplatzes und der anschlüsse) inkl Mega Sensor Shield v2.0.
Dazu der MPU6050 (gyro+acc), MS561101BA (Baro), HMC5883 (magneto) und Neo 6 GPS.
Ich wollte ein Ublox Neo7m nutzen aber das gibt keine Rückmeldung also bleibt es beim Neo 6.
Für Video kommt ein 5ghz System zum Einsatz mit eine Scjam SJ4000 sowie ein OSD.
Hier muss ich aber noch das mit dem Umwandler der Spannung für den Sender ändern dazu ist noch der Klotz auf dem Arm.
Das OSD bereitet mir noch Probleme da ich trotz aller versuche nicht das MinimOSD nicht neu programmieren kann.
Positionslichter (gemäß farbgebung der Luftfahrt) funktionieren auch rund um sowie eine Led leiste an der Unterseite die mir anzeigt wo vorne ist.
Desweitern ist ein kleiner Arduino Nano verbaut der alleine zum Protokoll führen vorhanden ist und mit multiwiiDataLogger-master arbeitet.
Die KISS 18A sind bestellt und zum Einsatz kommen jetzt T-Motor MT2212 980KV statt 1100kv.
Am Koffer muss ich noch einiges Arbeiten aber die Hardware ist schonmal da und Funktioniert.
Fertig Stellung? irgendwann Mitte des Jahres da das Auto vorrang hat.
Ohne abdeckung


mit Abdeckung


Koffer


 Je mehr dran ist, desto mehr kann auch kaputt gehen und desto kürzer wird die Flugzeit. Solange du nicht im Regen fliegst, passiert mit der Elektronik nix.
Je mehr dran ist, desto mehr kann auch kaputt gehen und desto kürzer wird die Flugzeit. Solange du nicht im Regen fliegst, passiert mit der Elektronik nix.









