Moin FPV‘ler,
ich möchte euch hier mal mein FPV-GoPro-Copter Konzept vorstellen.
[highlight]Anforderungen ...[/highlight]
Mein Ziel ist es eine fliegende Video- / GoPro-Plattform mit möglichst ruhigem Flug- / Videobild zu erhalten, welche jedoch auch "sportlich" geflogen werden kann und bei einem Absturz im Kern möglichst unbeschadet bleibt bzw. mit geringen Kosten und Aufwand wieder aufgebaut werden kann.
[highlight]Welcher Rahmen für den Copter? ...[/highlight]
Als erstes musste ich mir über das zu tragende Gewicht klar werden und somit musste die Entscheidung hinsichtlich des Videosystems gefällt werden. Ich habe lange hin und her überlegt, ob ich was größeres als eine GoPro HD Hero in die Luft bringen möchte und ob es überhaupt Sinn machen würde für meinen eigenen Anwendungszweck, der Landschaftsvideografie aus dem "dynamischen" (Konturen-)Flug heraus, mehr als eine GoPro HD zu nutzen. Zumal die neue GoPro Hero 2 jetzt auch mit 3 Blickfeldeinstellungen (FOV) von 170° (weit), 127° (mittel) und 90° (eng) in 1080P und 720P Modus daherkommt und somit unterschiedliche Brennweiten simuliert.
Als ich noch mit diesen Gedanken im Kopf den Film "The Art of Flight" auf Blu-ray in Full-HD konsumierte wurde mir bei den Aufnahmen des Films (viele mit der GoPro gefilmt) klar, dass für meinen Anwendungszwecke alles außer einer GoPro HD nur Energie und somit Flugzeitverschwendung sei würde.
Mit GoPro und Gimbal hieß es somit also ca. 210g an Zusatzgewicht zum Abheben zu bewegen – die Aufgabe sollte also lösbar sein und sich auch kostentechnisch gut realisieren lassen.
Eine GoPro HD habe ich schon mit der Quadrixette 30 von Nicolas zum Fliegen bekommen.
Ich mag die Quadrixette und fliege sie auch gerne, aber der Vorteil der "kleinen Hummel" liegt klar in ihrer kompaktheit und damit verbunden dann auch nicht unbedingt im absolut ruhigem Flugbild.
Ich möchte mehr in Sachen "Video- Smoothness" und Tragfähigkeit - ein GoPro-Gimbal, GPS, extra FPV-Kamera und OSD sollten dafür ja auch noch mit an Board dürfen!
Kurzzeitig dachte ich noch darüber nach meinen Flyduspider von Flyduino zum GoPro-Träger umzubauen, aber der Flyduspider wurde wohl primär als Fun-Copter konzipiert und zeigt sich schon von Haus aus sehr Kopflastig. Die 220g zusätzliches Gewicht am Kopf würden dann auch ca. 400g Gegengewicht am Heck fordern und damit kommt der kleine Hexacopter mit seinen 8" Luftschrauben auch schnell an die Grenzen des effizienten und sicheren Fliegens.
Auch fehlt es dem Spider an Befestigungsmöglichkeiten für den Gimbal und die ganze Steuerelektronik zusammen mit GPS und OSD müsste am Spider turmartig gestapelt werden. Das sieht dann nicht nur komisch aus, sondern ist auch bei Abstürzen nicht sonderlich widerstandsfähig und könnte somit die Absturzkosten unnötig in die Höhe treiben.
[highlight]Ein eigenes Rahmendesign ...[/highlight]
Na gut, dann muss ich mir halt selbst was einfallen lassen …
Die Aufzeichnung der GoPro sollte frei von Luftschrauben sein und auf eine tiefhängende Montage der GoPro, welche dann noch ein großes Landestell mit sich bringt, wollte ich verzichten. Somit musste die GoPro an die Front verlegt werden und ein asymmetrisches "Spiderdesign" sollte dabei für die nötige Balance und Stabilität sorgen.
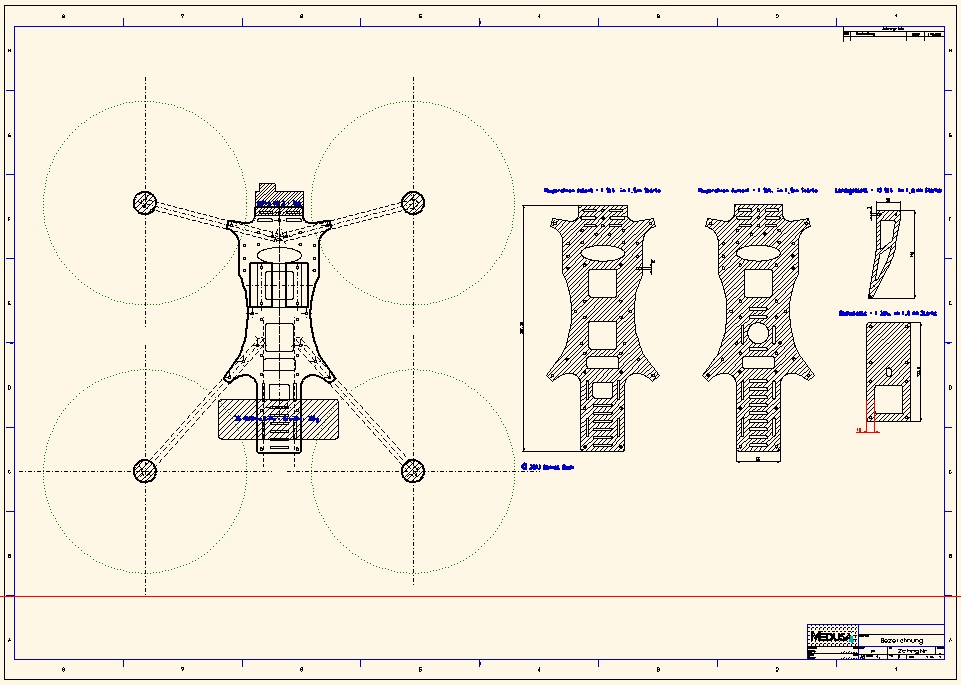
Bei den Auslegern habe ich aus Kosten und Beschaffungsgründen keine Carbonrohre genommen und mich daher für ein einfaches 10mm x 10mm ALU Vierkantrohr entschieden. Bei einer Auslegerlänge von nur 19cm (vorne) und 23cm (hinten) wäre der Gewichtsvorteil von Carbon wohl auch durch die aufwendigeren Motorhalterungen und zusätzlichen Schrauben aufgefressen worden. Um die Länge und das Gewicht der Vierkantrohre zu reduzieren und um damit die Steifheit der Ausleger zu erhöhen habe ich diese nicht einfach sternförmig auf einem Punkt zulaufen lassen.

Mein Rahmenkonzept sieht die Rahmenplatten also nicht nur als Montageplatte für die Ausleger vor, sondern vielmehr als ein überbrückendes / tragendes Teil des Gesamtrahmens.
Die Rahmenplatten als Brücke zwischen den Auslegern zu benutzen erlaub es mir auch drei Befestigungspunkte für elektronische Komponenten bereitstellen zu können und mit der hinzugewonnen Flexibilität eine gezieltere Gewichtsverteilung und eine geringe Bauhöhe zu erreichen.

Um das gewährleisten zu können entschied ich mich nicht nur aus ästhetischen Gründen gegen eine einfache Akkuschiene, welche quer über die hinteren Ausleger verlaufen müsste und bei einem Motorabstand von 41 cm irrsinnige Dimensionen einnehmen dürfte.
Damit man trotzdem möglichst flexibel eine LiPo an dem Rahmen befestigen kann verpasste ich dem Copter einfach einen "Wurmvorsatz" mit der Funktion als Akkurutsche.
Der Rahmen erlaub es daher einen LiPo vom Zentrum des Copters bis ans Ende des "Wurmvorsatzes" zu befestigen und das sowohl in Quer- als auch in Längsrichtung. Somit sollte jeder erdenklich sinnvolle LiPo an dem Copter zu befestigen sein.

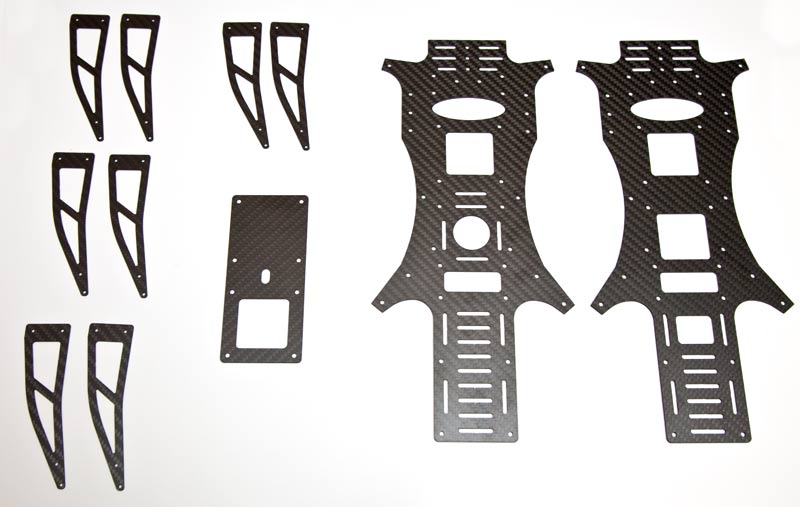
Die Deckplatte für die Elektronik legt sich schützend über die Befestigungspunkte 2 und 3 (von vorne gezählt). Zwischen den Befestigungspunkten ist noch Platz für einen durch den Rahmen vertikal einzubauenden Videosender, welcher über die das Gewinde der Antennenbuchse an der Deckplatte befestigt werden kann.
Um einen guten Empfang für ein GPS-Empfänger zu gewährleisten ist die Deckplatte ist über dem Befestigungspunkt 3 (hinten) ausgeschnitten. Der 3-Teilige (ohne Ausleger) Rahmen ist aus 1,5 mm Carbon gefräst und die Teile wiegen zusammen nur 105 g – die 8 Teile für die 4 Landebeine (2 Stk. bilden ein Bein) an den Ausleger sind aus 1mm Carbon gefräst und wiegen zusammen nur 20 g. Die Aluausleger haben zusätzlich noch 80 g auf die Waage gebracht.
[highlight]Auswahl der Komponenten ...[/highlight]
Antrieb
Beim Setup wollte ich möglichst flexibel bleiben und habe mich, auch um später Kosten zu sparen, für einen 3-4S tauglichen Antrieb entschieden. Damit sollten dann je nach LiPo-Zellenanzahl der Einsatz von Luftschrauben der Größe 8" bis 12" möglich sein.
Weil ich noch keine 4S-Lipos mein eigen nenne werde ich mit 3S und 11" Luftschraube an den Start gehen und mir später mal einen 4S Lipo und 9" Luftschrauben zulegen.
FlightController
Beim FlightController setzte ich für den Anfang auf ein MultiWii / ArduPirate kompatibles MEGA-Board (hatte ich schon in der Bastelkiste) in Verbindung mit einer aktuellen 10DOF IMU (MPU6050). Bei Verfügbarkeit der OpenPilot CopterControl 3 Plattform könnte ich mir jedoch einen Wechsel auf die CC3D gut vorstellen.
GPS
Ich habe hier 2 verschiedene GPS-Boards vor mir liegen und werde mich wohl später entscheiden welches ich davon nehme. Beide müssen aber noch mit einer neuen Firmware bespielt werden, damit die versprochene Refresh-Rate von 10Hz genutzt werden kann.
Das Drotek ist ein paar Gramm leichter – vielleicht ein Grund sich für das Drotek zu entscheiden.
Video- / FPV-Equipment
Da ich die GoPro HD auf einem Gimbal setzen möchte und ich auch gerne in den Genuss einer WDR / HR Kamera kommen wollte habe ich mich für eine extra FPV-Kamera entschieden und überlasse der GoPro nur noch das Full-HD Recording.
Für den Gimbal von Quadframe.com habe ich mich entschieden, weil ich die Gewichtsverteilung der Gimbal-Konstruktion für mein Rahmenkonzept als gut befunden habe. Unabdingbar liegt die GoPro weit vorne, aber die "schwere" Gimbal-Konstruktion mit den Servos liegt "weit" dahinter und somit mehr zum Mittelpunkt des Copters. Ob der Gimbal von Quadframe.com auch im Flug was taugt wird sich noch zeigen müssen.
Damit ich dann auch ganz legal fliegen kann und hier kein schlechtes Vorbild abgebe gibt es noch ein 5.8 Ghz Video-TX, welcher auch zu meiner Fatshark-Brille mit eingebautem RX kompatibel ist. So kann ich auch mal auf den Aufbau der Groundstation mit Diversity-RX (SPW / Helix) verzichten und ganz spontan in die Lüfte steigen.
OnScreenDisplay
Wenn ich schon eine 10 DOF IMU und ein MEGA-Board zusammen mit einem GPS betreibe, dann möchte ich davon auch was beim Fliegen durch die Brille mitbekommen / sehen und daher habe ich dem Copter noch ein MultiWii-OSD spendiert.

Der Copter befindet sich derzeit noch im Aufbau und ich werde an dieser Stelle weiter berichten …
Grüße aus Hamburg,
Daniel
ich möchte euch hier mal mein FPV-GoPro-Copter Konzept vorstellen.
[highlight]Anforderungen ...[/highlight]
Mein Ziel ist es eine fliegende Video- / GoPro-Plattform mit möglichst ruhigem Flug- / Videobild zu erhalten, welche jedoch auch "sportlich" geflogen werden kann und bei einem Absturz im Kern möglichst unbeschadet bleibt bzw. mit geringen Kosten und Aufwand wieder aufgebaut werden kann.
- Die Videoaufzeichnung sollte onboard und in Full-HD erfolgen und es dürfen keine Luftschrauben in der Aufzeichnung zu sehen sein.
- Der Rahmen sollte eine feste Montage der Kamera zulassen und auch über die Möglichkeiten zur Befestigung eines Gimbal verfügen.
- Um ein wenig Erfahrung zu sammeln und um einige Möglichkeiten auszutesten sollte der Rahmen eine 3S-4S Motorisierung in Verbindung mit 8"-12" Luftschrauben ermöglichen und ein weites Spektrum an LiPos (2.200 mAh bis 4.000 mAh) tragen / austarieren können.
- Der Rahmen sollte über genug Platz und Freiheiten für die Montage des elektronischen Equipments verfügen und "Turmbauten" sollten dabei vermieden werden.
- Alle elektronischen Komponenten sollten sich an einen möglichst geschützten Platz befinden.
- Der Copter sollte sich auch ohne Gimbal / Kamera austarieren und fliegen lassen können.
- Flugzeiten von min. 10 min. (gemütliches FPV-Fliegen) sollten erreicht werden.
- Der Copter sollte kompakt sein und die Basiskosten möglichst gering.
[highlight]Welcher Rahmen für den Copter? ...[/highlight]
Als erstes musste ich mir über das zu tragende Gewicht klar werden und somit musste die Entscheidung hinsichtlich des Videosystems gefällt werden. Ich habe lange hin und her überlegt, ob ich was größeres als eine GoPro HD Hero in die Luft bringen möchte und ob es überhaupt Sinn machen würde für meinen eigenen Anwendungszweck, der Landschaftsvideografie aus dem "dynamischen" (Konturen-)Flug heraus, mehr als eine GoPro HD zu nutzen. Zumal die neue GoPro Hero 2 jetzt auch mit 3 Blickfeldeinstellungen (FOV) von 170° (weit), 127° (mittel) und 90° (eng) in 1080P und 720P Modus daherkommt und somit unterschiedliche Brennweiten simuliert.
Als ich noch mit diesen Gedanken im Kopf den Film "The Art of Flight" auf Blu-ray in Full-HD konsumierte wurde mir bei den Aufnahmen des Films (viele mit der GoPro gefilmt) klar, dass für meinen Anwendungszwecke alles außer einer GoPro HD nur Energie und somit Flugzeitverschwendung sei würde.
Mit GoPro und Gimbal hieß es somit also ca. 210g an Zusatzgewicht zum Abheben zu bewegen – die Aufgabe sollte also lösbar sein und sich auch kostentechnisch gut realisieren lassen.
Eine GoPro HD habe ich schon mit der Quadrixette 30 von Nicolas zum Fliegen bekommen.
Ich mag die Quadrixette und fliege sie auch gerne, aber der Vorteil der "kleinen Hummel" liegt klar in ihrer kompaktheit und damit verbunden dann auch nicht unbedingt im absolut ruhigem Flugbild.
Ich möchte mehr in Sachen "Video- Smoothness" und Tragfähigkeit - ein GoPro-Gimbal, GPS, extra FPV-Kamera und OSD sollten dafür ja auch noch mit an Board dürfen!
Kurzzeitig dachte ich noch darüber nach meinen Flyduspider von Flyduino zum GoPro-Träger umzubauen, aber der Flyduspider wurde wohl primär als Fun-Copter konzipiert und zeigt sich schon von Haus aus sehr Kopflastig. Die 220g zusätzliches Gewicht am Kopf würden dann auch ca. 400g Gegengewicht am Heck fordern und damit kommt der kleine Hexacopter mit seinen 8" Luftschrauben auch schnell an die Grenzen des effizienten und sicheren Fliegens.
Auch fehlt es dem Spider an Befestigungsmöglichkeiten für den Gimbal und die ganze Steuerelektronik zusammen mit GPS und OSD müsste am Spider turmartig gestapelt werden. Das sieht dann nicht nur komisch aus, sondern ist auch bei Abstürzen nicht sonderlich widerstandsfähig und könnte somit die Absturzkosten unnötig in die Höhe treiben.
[highlight]Ein eigenes Rahmendesign ...[/highlight]
Na gut, dann muss ich mir halt selbst was einfallen lassen …
Die Aufzeichnung der GoPro sollte frei von Luftschrauben sein und auf eine tiefhängende Montage der GoPro, welche dann noch ein großes Landestell mit sich bringt, wollte ich verzichten. Somit musste die GoPro an die Front verlegt werden und ein asymmetrisches "Spiderdesign" sollte dabei für die nötige Balance und Stabilität sorgen.
Bei den Auslegern habe ich aus Kosten und Beschaffungsgründen keine Carbonrohre genommen und mich daher für ein einfaches 10mm x 10mm ALU Vierkantrohr entschieden. Bei einer Auslegerlänge von nur 19cm (vorne) und 23cm (hinten) wäre der Gewichtsvorteil von Carbon wohl auch durch die aufwendigeren Motorhalterungen und zusätzlichen Schrauben aufgefressen worden. Um die Länge und das Gewicht der Vierkantrohre zu reduzieren und um damit die Steifheit der Ausleger zu erhöhen habe ich diese nicht einfach sternförmig auf einem Punkt zulaufen lassen.
Mein Rahmenkonzept sieht die Rahmenplatten also nicht nur als Montageplatte für die Ausleger vor, sondern vielmehr als ein überbrückendes / tragendes Teil des Gesamtrahmens.
Die Rahmenplatten als Brücke zwischen den Auslegern zu benutzen erlaub es mir auch drei Befestigungspunkte für elektronische Komponenten bereitstellen zu können und mit der hinzugewonnen Flexibilität eine gezieltere Gewichtsverteilung und eine geringe Bauhöhe zu erreichen.
Um das gewährleisten zu können entschied ich mich nicht nur aus ästhetischen Gründen gegen eine einfache Akkuschiene, welche quer über die hinteren Ausleger verlaufen müsste und bei einem Motorabstand von 41 cm irrsinnige Dimensionen einnehmen dürfte.
Damit man trotzdem möglichst flexibel eine LiPo an dem Rahmen befestigen kann verpasste ich dem Copter einfach einen "Wurmvorsatz" mit der Funktion als Akkurutsche.
Der Rahmen erlaub es daher einen LiPo vom Zentrum des Copters bis ans Ende des "Wurmvorsatzes" zu befestigen und das sowohl in Quer- als auch in Längsrichtung. Somit sollte jeder erdenklich sinnvolle LiPo an dem Copter zu befestigen sein.
Die Deckplatte für die Elektronik legt sich schützend über die Befestigungspunkte 2 und 3 (von vorne gezählt). Zwischen den Befestigungspunkten ist noch Platz für einen durch den Rahmen vertikal einzubauenden Videosender, welcher über die das Gewinde der Antennenbuchse an der Deckplatte befestigt werden kann.
Um einen guten Empfang für ein GPS-Empfänger zu gewährleisten ist die Deckplatte ist über dem Befestigungspunkt 3 (hinten) ausgeschnitten. Der 3-Teilige (ohne Ausleger) Rahmen ist aus 1,5 mm Carbon gefräst und die Teile wiegen zusammen nur 105 g – die 8 Teile für die 4 Landebeine (2 Stk. bilden ein Bein) an den Ausleger sind aus 1mm Carbon gefräst und wiegen zusammen nur 20 g. Die Aluausleger haben zusätzlich noch 80 g auf die Waage gebracht.
[highlight]Auswahl der Komponenten ...[/highlight]
Antrieb
Beim Setup wollte ich möglichst flexibel bleiben und habe mich, auch um später Kosten zu sparen, für einen 3-4S tauglichen Antrieb entschieden. Damit sollten dann je nach LiPo-Zellenanzahl der Einsatz von Luftschrauben der Größe 8" bis 12" möglich sein.
- Motor: Tiger-Motor MT2216 900KV (2-4S)
- Regler / ESC: Hobbywing FunFly 18A (3-4S)
Weil ich noch keine 4S-Lipos mein eigen nenne werde ich mit 3S und 11" Luftschraube an den Start gehen und mir später mal einen 4S Lipo und 9" Luftschrauben zulegen.
FlightController
Beim FlightController setzte ich für den Anfang auf ein MultiWii / ArduPirate kompatibles MEGA-Board (hatte ich schon in der Bastelkiste) in Verbindung mit einer aktuellen 10DOF IMU (MPU6050). Bei Verfügbarkeit der OpenPilot CopterControl 3 Plattform könnte ich mir jedoch einen Wechsel auf die CC3D gut vorstellen.
- FlightController: Flyduino MEGA Flight Controller CPU Board
- IMU: Drotek 10DOF (MPU6050, HMC5883, MS5611)
GPS
Ich habe hier 2 verschiedene GPS-Boards vor mir liegen und werde mich wohl später entscheiden welches ich davon nehme. Beide müssen aber noch mit einer neuen Firmware bespielt werden, damit die versprochene Refresh-Rate von 10Hz genutzt werden kann.
- GPS-Board: FMP04 GPS Modul auf dem Flyduino FMP04 GPS Bob oder das PA6C GPS mit LLC Breakout Board von Drotek
Das Drotek ist ein paar Gramm leichter – vielleicht ein Grund sich für das Drotek zu entscheiden.
Video- / FPV-Equipment
Da ich die GoPro HD auf einem Gimbal setzen möchte und ich auch gerne in den Genuss einer WDR / HR Kamera kommen wollte habe ich mich für eine extra FPV-Kamera entschieden und überlasse der GoPro nur noch das Full-HD Recording.
- FPV-Kamera: 600TVL SONY Super HAD CCD OSD
- Videoaufzeichung: GoPro HD Hero
- Gimbal: Quadframe.com GoPro 2-axis (black) Gimbal
Für den Gimbal von Quadframe.com habe ich mich entschieden, weil ich die Gewichtsverteilung der Gimbal-Konstruktion für mein Rahmenkonzept als gut befunden habe. Unabdingbar liegt die GoPro weit vorne, aber die "schwere" Gimbal-Konstruktion mit den Servos liegt "weit" dahinter und somit mehr zum Mittelpunkt des Copters. Ob der Gimbal von Quadframe.com auch im Flug was taugt wird sich noch zeigen müssen.
Damit ich dann auch ganz legal fliegen kann und hier kein schlechtes Vorbild abgebe gibt es noch ein 5.8 Ghz Video-TX, welcher auch zu meiner Fatshark-Brille mit eingebautem RX kompatibel ist. So kann ich auch mal auf den Aufbau der Groundstation mit Diversity-RX (SPW / Helix) verzichten und ganz spontan in die Lüfte steigen.
- Video-TX: 5,8 GHz Iftrontech 25 mW A/V Nano Stinger
- Antenne: 5.8 Ghz - Cloverleaf
OnScreenDisplay
Wenn ich schon eine 10 DOF IMU und ein MEGA-Board zusammen mit einem GPS betreibe, dann möchte ich davon auch was beim Fliegen durch die Brille mitbekommen / sehen und daher habe ich dem Copter noch ein MultiWii-OSD spendiert.
- OSD: Rushduino MCE OSD V1.1
Der Copter befindet sich derzeit noch im Aufbau und ich werde an dieser Stelle weiter berichten …
Grüße aus Hamburg,
Daniel
Zuletzt bearbeitet:
")