
KAMERA NIR-FPV (Nahes InfraRot) mit dem Kopter
- Themenstarter WiSi-Testpilot
- Beginndatum
Hier wieder ein kleines Update zur Multispektralkamera.
Das Gesamtgewicht ist 470 g. Die Einheit lässt sich 90° nach unten schwenken. Die Module sind auch einzeln benutzbar.
Es sind von oben rechts:
Flir Vue Pro 336 x 256 Pixel, FoV 34° mit HDMI & Powermodul,
FlyCamOne eco HD, Foto 2592 x 1944 Pixel, FoV 96°
Unten:
Amimon ProSight, FoV zur Zeit ~34°.
Die beiden linken Kameras sind IR offen, so dass ich verschieden Filter davor schrauben kann. Die oberen beiden Kameras sollen an die Lightbridge 2, da es damit inzwischen möglich ist, zwei Bilder gleichzeitig zu übertragen. Das ProSight hat einen eigenen 5.8 GHz Sender. Dazu fehlt nun noch ein Onboard-Rekorder, der vermutlich bald erscheinen wird.
Viele Grüße,
Wilhelm
Das Gesamtgewicht ist 470 g. Die Einheit lässt sich 90° nach unten schwenken. Die Module sind auch einzeln benutzbar.
Es sind von oben rechts:
Flir Vue Pro 336 x 256 Pixel, FoV 34° mit HDMI & Powermodul,
FlyCamOne eco HD, Foto 2592 x 1944 Pixel, FoV 96°
Unten:
Amimon ProSight, FoV zur Zeit ~34°.
Die beiden linken Kameras sind IR offen, so dass ich verschieden Filter davor schrauben kann. Die oberen beiden Kameras sollen an die Lightbridge 2, da es damit inzwischen möglich ist, zwei Bilder gleichzeitig zu übertragen. Das ProSight hat einen eigenen 5.8 GHz Sender. Dazu fehlt nun noch ein Onboard-Rekorder, der vermutlich bald erscheinen wird.
Viele Grüße,
Wilhelm
Anhänge
-
 508,6 KB Aufrufe: 62
508,6 KB Aufrufe: 62
Ich konnte nicht widerstehen und habe auch einen Mavic bestellt. Es ist mein erster RTF Kopter. Vielleicht kommt er rechtzeitig um noch ein paar schönere Herbstbilder zu machen.
Im Moment laden die Akkus für den Großen…
Wünsche Euch einen schönen, sonnigen Herbstsonntag,
Wilhelm
Im Moment laden die Akkus für den Großen…
Wünsche Euch einen schönen, sonnigen Herbstsonntag,
Wilhelm
Anhänge
-
 410,2 KB Aufrufe: 53
410,2 KB Aufrufe: 53 -
 996,6 KB Aufrufe: 57
996,6 KB Aufrufe: 57
Auf dem Gebiet „NIR mit dem Kopter“ tut sich was. Flir hat eine Kamera auf Basis der Indium Gallium Arsenide (InGaAs) Technologie herausgebracht.
http://www.flir.com/tauswir/
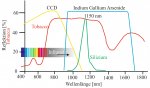
In dem Diagramm unten sind verschiedene Spektren abgebildet, die den Zusammenhang etwas zeigen sollen. Der optisch aktive Bereich ist 900 – 1700 nm und schließt an den aktiven Bereich einer CCD (oder CMOS) Kamera an. Wichtig ist, dass nun die Emissionsbande einer Solarzelle ganz erfasst wird, wohingegen der Überlappungsbereich zum CCD Sensor nur gering ist. Spannend ist nun die Frage, ob man beim Überfliegen einer Solaranlage Unterschiede/Defekte erkennen kann.
Siliziumbande abgemalt von Fuyuki et al. Appl. Phys. Lett. 86, 262108, 2005
Tabak Spektrum abgemalt von Knipling, Remote Sensing of Environment 1, 155-159, 1970
Die CCD und InGaAs Kurven sind nur schematisch.
Viele Grüße,
Wilhelm
http://www.flir.com/tauswir/
In dem Diagramm unten sind verschiedene Spektren abgebildet, die den Zusammenhang etwas zeigen sollen. Der optisch aktive Bereich ist 900 – 1700 nm und schließt an den aktiven Bereich einer CCD (oder CMOS) Kamera an. Wichtig ist, dass nun die Emissionsbande einer Solarzelle ganz erfasst wird, wohingegen der Überlappungsbereich zum CCD Sensor nur gering ist. Spannend ist nun die Frage, ob man beim Überfliegen einer Solaranlage Unterschiede/Defekte erkennen kann.
Siliziumbande abgemalt von Fuyuki et al. Appl. Phys. Lett. 86, 262108, 2005
Tabak Spektrum abgemalt von Knipling, Remote Sensing of Environment 1, 155-159, 1970
Die CCD und InGaAs Kurven sind nur schematisch.
Viele Grüße,
Wilhelm
Anhänge
-
 244 KB Aufrufe: 36
244 KB Aufrufe: 36
G
Hey ") Jap schon n paar mal gemacht.
Jap schon n paar mal gemacht.
zum "mechanischen teil" gibts n super video, zwar nicht von mir aber man muss das rad ja nicht nochmal erfinden.
https://www.youtube.com/watch?v=dkrHCdp3E7k
Wichtig is dann, welche art von "filter" willst du verwenden.
einen der rot wegschneidet und für nir offen lässt? geht kann man aber nicht den klassischen index berechnen, oder einen der blau rausschneidet und dort nir detektiert?
Außerdem wäre es gut nir auch nicht komplett offen zu lassen sondern X wellenlänge nach oben nen cut filter einzubauen damit man nicht zu breitbandig misst. -> filter stack -> 2 Filter sinvoll.
hat alles vor und nachteile beim späteren verwenden der daten.
und da is meiner meinung nach der größte knackpunkt, viele bauen n ndvi nur was genau bringt das ? der index is so schnell gesättigt und ist dann einfach 1 -> also pfanze. mehr kann der eigentlich garnicht aussagen, vor allem nicht mit einem Sensor der nicht kalibriert ist wie ne umgebaute nex.
beachte auch ihr bekommt immer nur relative daten mit so einem aufbau, absolut leider nicht. Tag später -> stunde später -> selbst im selben flug können sich die lichtbedinungen ändern.
außerdem ganz wichtig die korrektur der daten!
-Raw is pflicht wegen des größeren dynamikumfangs
-korrektur auf dunkelstrom
-korrektur auf vignetting
-weißabgleich manuell machen sonst ist eh alles hinüber
(bedenkt das das messen eine reflektion was komplett anderes ist als n schönes bild zu machen. unsere augen und auch die kamera rezeptoren nehmen verschiedene wellenlängen mit verschiedener intensität war, das muss korregiert werden!)
-kamera auf optische fehler kalibrieren und korregieren
das is nix was man mal einfach so kurz macht den filter zu welchseln is da wirklich nur der anfang, und das hier nur n kurzer anriss des ganzen in meiner kaffeepause
zum thema:
anfangen, und mich löcher in bauch fragen, gerne per pm.
Jap schon n paar mal gemacht.zum "mechanischen teil" gibts n super video, zwar nicht von mir aber man muss das rad ja nicht nochmal erfinden.
https://www.youtube.com/watch?v=dkrHCdp3E7k
Wichtig is dann, welche art von "filter" willst du verwenden.
einen der rot wegschneidet und für nir offen lässt? geht kann man aber nicht den klassischen index berechnen, oder einen der blau rausschneidet und dort nir detektiert?
Außerdem wäre es gut nir auch nicht komplett offen zu lassen sondern X wellenlänge nach oben nen cut filter einzubauen damit man nicht zu breitbandig misst. -> filter stack -> 2 Filter sinvoll.
hat alles vor und nachteile beim späteren verwenden der daten.
und da is meiner meinung nach der größte knackpunkt, viele bauen n ndvi nur was genau bringt das ? der index is so schnell gesättigt und ist dann einfach 1 -> also pfanze. mehr kann der eigentlich garnicht aussagen, vor allem nicht mit einem Sensor der nicht kalibriert ist wie ne umgebaute nex.
beachte auch ihr bekommt immer nur relative daten mit so einem aufbau, absolut leider nicht. Tag später -> stunde später -> selbst im selben flug können sich die lichtbedinungen ändern.
außerdem ganz wichtig die korrektur der daten!
-Raw is pflicht wegen des größeren dynamikumfangs
-korrektur auf dunkelstrom
-korrektur auf vignetting
-weißabgleich manuell machen sonst ist eh alles hinüber
(bedenkt das das messen eine reflektion was komplett anderes ist als n schönes bild zu machen. unsere augen und auch die kamera rezeptoren nehmen verschiedene wellenlängen mit verschiedener intensität war, das muss korregiert werden!)
-kamera auf optische fehler kalibrieren und korregieren
das is nix was man mal einfach so kurz macht
den filter zu welchseln is da wirklich nur der anfang, und das hier nur n kurzer anriss des ganzen in meiner kaffeepausezum thema:
Hat jemand Tipps, wie man einen Nex 5N-Body für NDVI-Mapping "hobbymäßig" umrüsten kann/sollte?
Zuletzt bearbeitet von einem Moderator:
@ Max,
danke für deine Info und sorry für meine späte Rückmeldung. Mein Interesse bezog sich darauf, dass mich ein Landwirt, der bei Pflanzenschutz-Feldversuchen mitmacht, auf derartige Lösungen mal angesprochen hatte.
@Wilhelm
Herbstbilder mit dem Mavic war Herbst 2017 gemeint, oder ?
Übrigens, mein kleines Winterprojekt ist jetzt soweit fertig...der Winter kann ab jetzt wieder Pause machen:
https://youtu.be/H50cF8os0fQ
- Flir Kamera (mit Bluetooth zur Konfiguration)
- 10x Zoom 700Tvl Sony Effio (sehr gute Lowlight-Fähigkeiten)
- 2x 10W Spot LED
- 3-Achs stabilisiert (Storm32)
danke für deine Info und sorry für meine späte Rückmeldung. Mein Interesse bezog sich darauf, dass mich ein Landwirt, der bei Pflanzenschutz-Feldversuchen mitmacht, auf derartige Lösungen mal angesprochen hatte.
@Wilhelm
Herbstbilder mit dem Mavic war Herbst 2017 gemeint, oder
?Übrigens, mein kleines Winterprojekt ist jetzt soweit fertig...der Winter kann ab jetzt wieder Pause machen:
https://youtu.be/H50cF8os0fQ
- Flir Kamera (mit Bluetooth zur Konfiguration)
- 10x Zoom 700Tvl Sony Effio (sehr gute Lowlight-Fähigkeiten)
- 2x 10W Spot LED
- 3-Achs stabilisiert (Storm32)
Zuletzt bearbeitet:
Ulrich, klasse Lösung! Ich bastele auch an „Vis-Zoom“.
Es war schon Herbst 2016 gemeint, aber manchmal kommt es eben anders…
Am Samstag habe ich beim Fliegen ein Halo gesehen, s. auch Flugwetter-Thread. Ein Halo entsteht durch Lichtbrechung und Reflektion an Eiskristallen, die sich in den Cirruswolken in ca 8 bis 12 km Höhe befinden. Da der Effekt sehr zart ist habe ich das Bild etwas verstärkt. Leider hatte ich keine NIR Kamera dabei.
Viele Grüße,
Wilhelm
Es war schon Herbst 2016 gemeint, aber manchmal kommt es eben anders…
Am Samstag habe ich beim Fliegen ein Halo gesehen, s. auch Flugwetter-Thread. Ein Halo entsteht durch Lichtbrechung und Reflektion an Eiskristallen, die sich in den Cirruswolken in ca 8 bis 12 km Höhe befinden. Da der Effekt sehr zart ist habe ich das Bild etwas verstärkt. Leider hatte ich keine NIR Kamera dabei.
Viele Grüße,
Wilhelm
Anhänge
-
 602,6 KB Aufrufe: 34
602,6 KB Aufrufe: 34
Übrigens, mein kleines Winterprojekt ist jetzt soweit fertig...der Winter kann ab jetzt wieder Pause machen:
Viele Grüße,
Wilhelm
Anhänge
-
 1,1 MB Aufrufe: 39
1,1 MB Aufrufe: 39 -
 1,4 MB Aufrufe: 39
1,4 MB Aufrufe: 39 -
 361,8 KB Aufrufe: 38
361,8 KB Aufrufe: 38
Zuletzt bearbeitet:
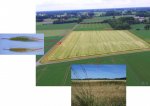
Ein Landwirt hatte mich gefragt, ob ich von seinem Gerstenfeld ein paar Aufnahmen machen könne. Deutlich sind ein heller Streifen und helle Flecken zu sehen. Die Ursache ist noch unklar.
Das ist ein schöner Fall für die NIR Technik. Ich werde das weiter verfolgen.
Außerdem habe ich noch einige Bilder von Teich vom 14.6.2017 angehängt.
Viele Grüße,
Wilhelm
Habe noch ein Bild vom Frühsommer 2017 eingefügt.
Das ist ein schöner Fall für die NIR Technik. Ich werde das weiter verfolgen.
Außerdem habe ich noch einige Bilder von Teich vom 14.6.2017 angehängt.
Viele Grüße,
Wilhelm
Habe noch ein Bild vom Frühsommer 2017 eingefügt.
Anhänge
-
 198,6 KB Aufrufe: 36
198,6 KB Aufrufe: 36 -
 228,8 KB Aufrufe: 38
228,8 KB Aufrufe: 38 -
 231,4 KB Aufrufe: 35
231,4 KB Aufrufe: 35 -
 453 KB Aufrufe: 38
453 KB Aufrufe: 38 -
 213,5 KB Aufrufe: 34
213,5 KB Aufrufe: 34 -
 529 KB Aufrufe: 24
529 KB Aufrufe: 24
Zuletzt bearbeitet:
Meine neue rote Haube möchte ich mal zeigen. Die Befestigung ist in Arbeit. Im Bau ist auch eine leichtere Variante des weißen Quad.
Da die verwendete A3 FC kein Servogimbal unterstützt, habe ich eine alte NAZA zwischen A3 F-Port und Servo geschaltet. Das PWM Signal, Masse und Plus 5 V gehen an X1 und das Servo steckt in F2. Die NAZA stabilisiert so die Tilt-Achse. Funktioniert auch kopfüber.
Viele Grüße,
Wilhelm
Da die verwendete A3 FC kein Servogimbal unterstützt, habe ich eine alte NAZA zwischen A3 F-Port und Servo geschaltet. Das PWM Signal, Masse und Plus 5 V gehen an X1 und das Servo steckt in F2. Die NAZA stabilisiert so die Tilt-Achse. Funktioniert auch kopfüber.
Viele Grüße,
Wilhelm
Anhänge
-
 1,1 MB Aufrufe: 21
1,1 MB Aufrufe: 21 -
 806,8 KB Aufrufe: 23
806,8 KB Aufrufe: 23 -
 515 KB Aufrufe: 24
515 KB Aufrufe: 24 -
 194,3 KB Aufrufe: 27
194,3 KB Aufrufe: 27
Hallo Stefan,
es ist die ganz normale Prosight Kamera. Die habe ich auf NIR „umgebaut“. Dazu muss man im Prinzip nur den IR-Cutfilter (s.Bild) entfernen. Ich habe aber eine andere IR offene Linse eingebaut. Nun kann ich mit anderen Filtern den Spektralbereich wählen.
Man munkelt, dass bald eine neue Kamera herauskommt.
Viele Grüße,
Wilhelm
es ist die ganz normale Prosight Kamera. Die habe ich auf NIR „umgebaut“. Dazu muss man im Prinzip nur den IR-Cutfilter (s.Bild) entfernen. Ich habe aber eine andere IR offene Linse eingebaut. Nun kann ich mit anderen Filtern den Spektralbereich wählen.
Man munkelt, dass bald eine neue Kamera herauskommt.
Viele Grüße,
Wilhelm
Anhänge
-
 263,4 KB Aufrufe: 28
263,4 KB Aufrufe: 28
Kleines Update mit ein paar Bildern zum Jahresende:
Sonnig, aber kalt und windig war es gestern.
Die Landebahn haben die Maulwürfe in Beschlag genommen.
Von meinen 3 Koptern ist zur Zeit nur einer flugfertig.
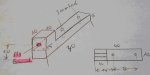
Sie haben alle eine rote Haube bekommen. Die Befestigung habe ich mit kleinen POM Teilen realisiert, s. Beispiel. Das hält sehr zuverlässig.
Die Hauben verbessern die Flugeigenschaften deutlich:
1) der Kopter hält auch bei starkem Wind die Höhe, da der Barometer geschützt ist.
2) der Kopter hält auch bei schnellem Vorwärtsflug die Höhe. Ohne Haube wirkt die große Centerplatte wie ein Tiefenruder und drückt den Kopter herunter. Die Höhenänderung wird von Flugkontroller ausgeglichen, was dann insgesamt zu einem schlangenlinienförmigen
bzw pumpenden Flug führte.
Ich wünsche Euch einen guten Rutsch und alles Gute für 2018.
Viele Grüße,
Wilhelm
Sonnig, aber kalt und windig war es gestern.
Die Landebahn haben die Maulwürfe in Beschlag genommen.
Von meinen 3 Koptern ist zur Zeit nur einer flugfertig.
Sie haben alle eine rote Haube bekommen. Die Befestigung habe ich mit kleinen POM Teilen realisiert, s. Beispiel. Das hält sehr zuverlässig.
Die Hauben verbessern die Flugeigenschaften deutlich:
1) der Kopter hält auch bei starkem Wind die Höhe, da der Barometer geschützt ist.
2) der Kopter hält auch bei schnellem Vorwärtsflug die Höhe. Ohne Haube wirkt die große Centerplatte wie ein Tiefenruder und drückt den Kopter herunter. Die Höhenänderung wird von Flugkontroller ausgeglichen, was dann insgesamt zu einem schlangenlinienförmigen
bzw pumpenden Flug führte.
Ich wünsche Euch einen guten Rutsch und alles Gute für 2018.
Viele Grüße,
Wilhelm
Anhänge
-
 1,1 MB Aufrufe: 23
1,1 MB Aufrufe: 23 -
 989,1 KB Aufrufe: 22
989,1 KB Aufrufe: 22 -
 239,6 KB Aufrufe: 21
239,6 KB Aufrufe: 21 -
 355,9 KB Aufrufe: 23
355,9 KB Aufrufe: 23 -
 233,5 KB Aufrufe: 23
233,5 KB Aufrufe: 23
Nach längerer Zeit mal wieder ein kleines Update, allerdings im Moment ohne NIR.
Es sind unter anderem ein aktuelles Bild vom Feld aus #153 und ein Foto, das den Oppositionseffekt zeigt.
https://de.wikipedia.org/wiki/Oppositionseffekt
Viele Grüße,
Wilhelm
Es sind unter anderem ein aktuelles Bild vom Feld aus #153 und ein Foto, das den Oppositionseffekt zeigt.
https://de.wikipedia.org/wiki/Oppositionseffekt
Viele Grüße,
Wilhelm
Anhänge
-
 1,9 MB Aufrufe: 18
1,9 MB Aufrufe: 18 -
 1,9 MB Aufrufe: 19
1,9 MB Aufrufe: 19 -
 1,3 MB Aufrufe: 21
1,3 MB Aufrufe: 21 -
 1,6 MB Aufrufe: 25
1,6 MB Aufrufe: 25
Zuletzt bearbeitet:

Meinen neuen NIR Kopter möchte ich hier zeigen. Der Rahmen ist von Camlifter und die Kamera ist eine Sony Alpha 6000. Es ist eine klasse Kamera und sie war relativ preiswert. Ferngesteuert wird die Kamera mit einem Gentwire Interface. Damit kann ich fokussieren, auslösen und zoomen. Die Kamera muss noch von einem Fachmann umgebaut werden. Es wird der IR Sperrfilter, der sich vor dem Sensor befindet, durch eine gleich dicke Glasscheibe ersetzt, so dass die gesamte spektrale Bandbreite des Sensors zur Verfügung steht. Ich werde mir auch noch einen Filter kaufen, der nur Licht mit einer Wellenlänge von unter 400 nm durchlässt, so dass auch UV Fotografie möglich ist.
Obwohl die Kamera noch starr an einem Tilt-Servo montiert ist, ist die Schärfe ok. Um das beurteilen zu können, schaue ich immer auf die hier reichlich herumstehenden Windräder. Der Ausschnitt stammt vom Original von ziemlich rechts außen.
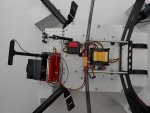
Zu meiner Wärmebildkamera habe ich mir eine Vorrichtung für den Handbetrieb gebastelt. Die Kamera lässt sich schnell vom Kopter abschrauben, so dass ich in Zukunft alle Kameras auch vom Fahrrad oder Auto aus nutzen kann.
Viele Grüße,
Wilhelm
Obwohl die Kamera noch starr an einem Tilt-Servo montiert ist, ist die Schärfe ok. Um das beurteilen zu können, schaue ich immer auf die hier reichlich herumstehenden Windräder. Der Ausschnitt stammt vom Original von ziemlich rechts außen.
Zu meiner Wärmebildkamera habe ich mir eine Vorrichtung für den Handbetrieb gebastelt. Die Kamera lässt sich schnell vom Kopter abschrauben, so dass ich in Zukunft alle Kameras auch vom Fahrrad oder Auto aus nutzen kann.
Viele Grüße,
Wilhelm
Anhänge
-
 96,1 KB Aufrufe: 7
96,1 KB Aufrufe: 7 -
 1,2 MB Aufrufe: 6
1,2 MB Aufrufe: 6 -
 737,6 KB Aufrufe: 7
737,6 KB Aufrufe: 7 -
 375 KB Aufrufe: 8
375 KB Aufrufe: 8 -
 28,5 KB Aufrufe: 8
28,5 KB Aufrufe: 8 -
 413 KB Aufrufe: 6
413 KB Aufrufe: 6 -
 492,6 KB Aufrufe: 5
492,6 KB Aufrufe: 5

