
So, da ich kurz Zeit habe, hier ein „kleines“ Projekt von mir.
Gebaut wird ein Senkrechtstarter, aber kein Kleiner aus Depron, das gibt’s ja schon öfters") . Dieser hier hat derzeit eine Spannweite von etwas über 4m, gebaut wurde mit Balsa, Alu, CFK und GFK.
. Dieser hier hat derzeit eine Spannweite von etwas über 4m, gebaut wurde mit Balsa, Alu, CFK und GFK.
Bisher wurde das Projekt im Rahmen einer Diplomarbeit (Abschluss einer Höheren Technischen Lehranstalt) mit dem Arbeitsnamen „SpeedCopter“ (hat nichts mit der tatsächlichen Geschwindigkeit zu tun, zur Diplomarbeit gehören auch Marketing usw., daher der Name) mit 2 Kollegen durchgeführt, jetzt nach Schulabschluss werde ich es privat fertigstellen und verbessern.
Nach elends langer Planung und 3 verschiedenen Versionen (die Details interessieren vermutlich eh keinen) habe ich das aktuelle Design erstellt und durch verschiedene Aerodynamik-Simulatoren gejagt und optimiert, rausgekommen ist folgendes:
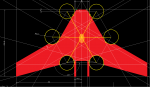
Die Maße stimmen noch nicht ganz, die Grundform ist jedoch schon erkennbar, im orangen Bereich befindet sich laut Simulatoren der aerodynamische Schwerpunkt, sehr nahe zu dem des Multicopters.
Ich habe mich für einen Hexacopter als Grundform entschieden und danach den Grundkörper in Form eines Nurflüglers hineingepasst. Da ziemlich viel Schub nötig ist, werden 12 Motoren in 6 Paaren eingesetzt, also wie bei einem X12.
Alle Motoren sind drehbar gelagert und können individuell geschwenkt werden.
Bei dem Nurflügler-Design habe ich mich an den Forschungen der Gebrüder Horten orientiert, laut Simulatoren ist das Konzept sehr flugfähig (nach tagelanger Arbeit).
Das ist die Grundidee, jedoch sind da noch ein paar andere Features dabei/warten auf den Einbau, wie zum Beispiel:
> ausfahrbare Tragflächen (auch Teleskop-Tragflächen), welche für Segelflug bzw. Gleitflug genutzt werden können. Ist nicht unbedingt eine hohe Geschwindigkeit nötig, so werden diese zusätzlichen Tragflächen aus dem Nurflügler-Grundkörper ausgefahren und das Fluggerät fliegt mit einem höheren Wirkungsgrad auf einer niedrigen Geschwindigkeit (wie ein Segelflugzeug), dies machst sich in längeren Flugzeiten bemerkbar.
Damit dies aber funktioniert, ohne dass die ganze Aerodynamik verändert wird, ist ein weiterer Trick nötig: ein ausfahrbares Heckleitwerk. Dieses fährt ebenfalls aus dem Grundkörper heraus und man kann jederzeit den Abstand zum Zentrum adjustieren, um ein optimales aerodynamisches Verhalten zu erreichen.
Der Ausfahrmechanismus ist fertig und getestet, die Tragflächen sind aber noch nicht fertig, mir ist das Balsa-Holz ausgegangen. Ob es in Kombination mit dem Heckleitwerk auch ordentlich funktioniert, kann ich ebenfalls nicht sagen, aber Probieren geht über Studieren.
> eine komplett neue Energieversorgung. Jeder Multicopter-Pilot kennt das Delima, das alles durch den Akku begrenzt wird. Da der SpeedCopter mit 20kg nicht gerade ein Leichtgewicht ist, würde man eine sehr hohe Akkukapazität brauchen, um halbwegs akzeptable Flugzeiten zu erreichen, deshalb habe ich mir mit einem Freund was neues überlegt.
Anders als alle anderen Multicopter wird der SpeedCopter nicht ausschließlich mit Lithium-Polymer Akkus (kurz LiPo) versorgt. Es verfügt über einen kleinen Verbrennungsmotor, der an einen Generator gekoppelt Strom für die Rotoren erzeugt. Der Generator erzeugt einen 3-phasigen Wechselstrom, welcher anschließend mit Brückengleichrichtern gleichgerichtet wird. Der Grund für diese aufwendige Art der Energieversorgung liegt in der viel höheren Energiedichte pro Kilogramm von Flüssigtreibstoffen im Gegensatz zu LiPo-Akkus. Die Energiedichte von Benzin ist fast 80fach höher als die eines LiPo-Akkus, sodass trotz der Verluste an Verbrenner und Generator die Flugzeit deutlich erhöht werden kann (theoretisch um das bis zu 10-fache), hier eine etwas realistischere Kalkulation:
Fertig aufgebaut sieht das System so aus:

Parallel zum Ausgang des Gleichrichters hängt noch ein Stützakku-Pack (7S2P 2500mAh LiFePo4), der im Falle eines Spannungseinbruchs oder Ausfall des Systems automatisch die Stromversorgung für mindestens 2 Minuten übernehmen kann. Wenn der Akku nicht benötigt wird, so wird er mit dem Generator zusätzlich geladen. Der Ladestrom des Akkus wird mit einem Shunt-Widerstand bestimmt und über MOSFETs geregelt. Die Drehzahl des Verbrennungsmotors wird je nach dem erforderlichen Strom geregelt. Wird mehr Strom von den Motoren benötigt als der Generator liefern kann, so bricht die Spannung ein. Dies wird gemessen und ausgewertet, und im Anschluss daran die entsprechende Drehzahl am Verbrennungsmotor eingestellt (so dass die Spannung möglichst konstant bei 23V bleibt).
Wie es sich im Copter-Modus macht kann ich noch nicht sagen, bisher haben wir maximal 30A gezogen, soweit läuft alles wie geplant, nur bei schneller Belastungsänderung muss noch der Zusatzakku einspringen, bei langsameren Änderungen geht es auch ohne Akku.
Der Aufbau:
Der SpeedCopter besteht aus mehreren Teilen:
1) Die Basis, an der alle essentiellen Teile montiert sind, sodass man auch nur damit fliegen gehen kann (dann halt nur als Multicopter)
2) Die Haupttragflächen, welche man mit Bolzen und einer Schraube mit der Basis verbindet.
3) Die ausfahrbaren Tragflächen, welche innerhalb der Haupttragflächen montiert werden.
Alle Oberflächen bestehen aus Balsa und sind/werden mit GFK-Matten laminiert. Als Träger für die ganze Struktur dienen 15x15mm Alu-Profile, für eine höhere Stabilität kommen außerdem noch Verstrebungen aus Balsa und Hartholz zum Einsatz. Die Motoren sind auf 26mm Carbon-Rohren mit selbstgefertigten Rohrschellen montiert, die Rohre sind doppelt gelagert und entweder direkt oder mit einem Zahnrad mit einem Servo verbunden.
Aktueller Stand:
Der Grundkörper ist fertig und auch schon kurz geflogen, jedoch wurden wegen eines dummen Firmware-Fehlers dabei die Landebeine komplett abgerissen, da muss jetzt was Stabileres her. Des Weiteren müssen die ausfahrbaren Tragflächen fertig gestellt und eingebaut werden, ebenso die Energieversorgung (bin bisher mit 6S LiPos geflogen), die muss man aber noch gründlich testen. Außerdem müssen die Tragflächen noch fertig laminiert werden. Hab aber leider gerade wenig Zeit.
So sieht's daweil aus:
Während dem Bau:



(mittlerweile sind auch schon die Flaps eingebaut)

Schwenkbare Rotoren

Und hier noch eine Fotomontage wie es beim Fliegen aussehen wird (der Grundkörper ist schon gefolgen, mit Tragflächen werde ich es dann mit dem neuen Landegestell auf der Wiese testen):

Technische Daten:
Motoren: Tiger Motors MN 4014 – 400KV – von T-Motors zur Verfügung gestellt
ESCs: Hobbywing Platinum Pro 30A
Props: 17x5,5” CFK-Props
Akku: 7S2P 2500mAh LiFePo4 – von SLS zur Verfügung gestellt
Verbrennungsmotor: RotoMotor ROTO 50 V2 – von RotoMotor Ltd. zur Verfügung gestellt
Generator: Kontronik PYRO 850-24P – von Kontronik zur Verfügung gestellt
Spannweite (Grundkörper): 4m
Spannweite (mit ausgefahrenen Tragflächen): 5,6m
Abfluggewicht: ca. 20kg
Firmware: modifizierte ArduCopter 2.9.1b Firmware
PS: für Ideen und Anregungen bin ich dankbar, das wird meine neue Versuchsplattform Nummer eins
Gebaut wird ein Senkrechtstarter, aber kein Kleiner aus Depron, das gibt’s ja schon öfters
. Dieser hier hat derzeit eine Spannweite von etwas über 4m, gebaut wurde mit Balsa, Alu, CFK und GFK.Bisher wurde das Projekt im Rahmen einer Diplomarbeit (Abschluss einer Höheren Technischen Lehranstalt) mit dem Arbeitsnamen „SpeedCopter“ (hat nichts mit der tatsächlichen Geschwindigkeit zu tun, zur Diplomarbeit gehören auch Marketing usw., daher der Name) mit 2 Kollegen durchgeführt, jetzt nach Schulabschluss werde ich es privat fertigstellen und verbessern.
Nach elends langer Planung und 3 verschiedenen Versionen (die Details interessieren vermutlich eh keinen) habe ich das aktuelle Design erstellt und durch verschiedene Aerodynamik-Simulatoren gejagt und optimiert, rausgekommen ist folgendes:
Die Maße stimmen noch nicht ganz, die Grundform ist jedoch schon erkennbar, im orangen Bereich befindet sich laut Simulatoren der aerodynamische Schwerpunkt, sehr nahe zu dem des Multicopters.
Ich habe mich für einen Hexacopter als Grundform entschieden und danach den Grundkörper in Form eines Nurflüglers hineingepasst. Da ziemlich viel Schub nötig ist, werden 12 Motoren in 6 Paaren eingesetzt, also wie bei einem X12.
Alle Motoren sind drehbar gelagert und können individuell geschwenkt werden.
Bei dem Nurflügler-Design habe ich mich an den Forschungen der Gebrüder Horten orientiert, laut Simulatoren ist das Konzept sehr flugfähig (nach tagelanger Arbeit
).Das ist die Grundidee, jedoch sind da noch ein paar andere Features dabei/warten auf den Einbau, wie zum Beispiel:
> ausfahrbare Tragflächen (auch Teleskop-Tragflächen), welche für Segelflug bzw. Gleitflug genutzt werden können. Ist nicht unbedingt eine hohe Geschwindigkeit nötig, so werden diese zusätzlichen Tragflächen aus dem Nurflügler-Grundkörper ausgefahren und das Fluggerät fliegt mit einem höheren Wirkungsgrad auf einer niedrigen Geschwindigkeit (wie ein Segelflugzeug), dies machst sich in längeren Flugzeiten bemerkbar.
Damit dies aber funktioniert, ohne dass die ganze Aerodynamik verändert wird, ist ein weiterer Trick nötig: ein ausfahrbares Heckleitwerk. Dieses fährt ebenfalls aus dem Grundkörper heraus und man kann jederzeit den Abstand zum Zentrum adjustieren, um ein optimales aerodynamisches Verhalten zu erreichen.
Der Ausfahrmechanismus ist fertig und getestet, die Tragflächen sind aber noch nicht fertig, mir ist das Balsa-Holz ausgegangen. Ob es in Kombination mit dem Heckleitwerk auch ordentlich funktioniert, kann ich ebenfalls nicht sagen, aber Probieren geht über Studieren.
> eine komplett neue Energieversorgung. Jeder Multicopter-Pilot kennt das Delima, das alles durch den Akku begrenzt wird. Da der SpeedCopter mit 20kg nicht gerade ein Leichtgewicht ist, würde man eine sehr hohe Akkukapazität brauchen, um halbwegs akzeptable Flugzeiten zu erreichen, deshalb habe ich mir mit einem Freund was neues überlegt.
Anders als alle anderen Multicopter wird der SpeedCopter nicht ausschließlich mit Lithium-Polymer Akkus (kurz LiPo) versorgt. Es verfügt über einen kleinen Verbrennungsmotor, der an einen Generator gekoppelt Strom für die Rotoren erzeugt. Der Generator erzeugt einen 3-phasigen Wechselstrom, welcher anschließend mit Brückengleichrichtern gleichgerichtet wird. Der Grund für diese aufwendige Art der Energieversorgung liegt in der viel höheren Energiedichte pro Kilogramm von Flüssigtreibstoffen im Gegensatz zu LiPo-Akkus. Die Energiedichte von Benzin ist fast 80fach höher als die eines LiPo-Akkus, sodass trotz der Verluste an Verbrenner und Generator die Flugzeit deutlich erhöht werden kann (theoretisch um das bis zu 10-fache), hier eine etwas realistischere Kalkulation:
• LiPos als Energieträger: Dies ist bei Multicoptern der Standard. LiPos zeichnen sich durch eine für Akkus hohe Energiedichte bei wenig Gewicht aus. Mit 60.000mAh (Akku-Gewicht: ca. 8,4kg) wäre bei einer Schwebeleistung von 2400W (200W pro Motor, Abfluggewicht: 20kg) und einer Restkapazität im Akku von 10% eine Flugzeit von ca. einer halben Stunde im Copter-Modus möglich. Dies ist jedoch sehr wenig, weshalb ein alternatives und komplett neues Antriebssystem überlegt wurde.
• Benzin als Energieträger: Der Verbrennungsmotor treibt einen Generator an, welcher eine drei-phasige Spannung ausgibt. Diese wird anschließend mit einem Brückengleichrichter gleichgerichtet. Mit diesem erzeugten Strom wird einerseits der Stützakku (hier als Kondensator eingezeichnet) geladen und die restliche Leistungselektronik (über Electronic Speed Controller werden Brushless-Motoren gesteuert) versorgt. Dieses System wird ein Leergewicht von ca. 3,5kg haben, wo noch das Gewicht des Treibstoffs dazu kommt. Mit 5 Litern Treibstoff sollten bereits über 100min Flugzeit möglich sein, wobei noch deutlich mehr Treibstoff in zusätzlichen Tanks mitgeführt werden kann. Ein weiterer Vorteil ist, dass Benzin verbrannt wird, wodurch der Copter im Flug leichter wird.
• Benzin als Energieträger: Der Verbrennungsmotor treibt einen Generator an, welcher eine drei-phasige Spannung ausgibt. Diese wird anschließend mit einem Brückengleichrichter gleichgerichtet. Mit diesem erzeugten Strom wird einerseits der Stützakku (hier als Kondensator eingezeichnet) geladen und die restliche Leistungselektronik (über Electronic Speed Controller werden Brushless-Motoren gesteuert) versorgt. Dieses System wird ein Leergewicht von ca. 3,5kg haben, wo noch das Gewicht des Treibstoffs dazu kommt. Mit 5 Litern Treibstoff sollten bereits über 100min Flugzeit möglich sein, wobei noch deutlich mehr Treibstoff in zusätzlichen Tanks mitgeführt werden kann. Ein weiterer Vorteil ist, dass Benzin verbrannt wird, wodurch der Copter im Flug leichter wird.
Fertig aufgebaut sieht das System so aus:
Parallel zum Ausgang des Gleichrichters hängt noch ein Stützakku-Pack (7S2P 2500mAh LiFePo4), der im Falle eines Spannungseinbruchs oder Ausfall des Systems automatisch die Stromversorgung für mindestens 2 Minuten übernehmen kann. Wenn der Akku nicht benötigt wird, so wird er mit dem Generator zusätzlich geladen. Der Ladestrom des Akkus wird mit einem Shunt-Widerstand bestimmt und über MOSFETs geregelt. Die Drehzahl des Verbrennungsmotors wird je nach dem erforderlichen Strom geregelt. Wird mehr Strom von den Motoren benötigt als der Generator liefern kann, so bricht die Spannung ein. Dies wird gemessen und ausgewertet, und im Anschluss daran die entsprechende Drehzahl am Verbrennungsmotor eingestellt (so dass die Spannung möglichst konstant bei 23V bleibt).
Wie es sich im Copter-Modus macht kann ich noch nicht sagen, bisher haben wir maximal 30A gezogen, soweit läuft alles wie geplant, nur bei schneller Belastungsänderung muss noch der Zusatzakku einspringen, bei langsameren Änderungen geht es auch ohne Akku.
Der Aufbau:
Der SpeedCopter besteht aus mehreren Teilen:
1) Die Basis, an der alle essentiellen Teile montiert sind, sodass man auch nur damit fliegen gehen kann (dann halt nur als Multicopter)
2) Die Haupttragflächen, welche man mit Bolzen und einer Schraube mit der Basis verbindet.
3) Die ausfahrbaren Tragflächen, welche innerhalb der Haupttragflächen montiert werden.
Alle Oberflächen bestehen aus Balsa und sind/werden mit GFK-Matten laminiert. Als Träger für die ganze Struktur dienen 15x15mm Alu-Profile, für eine höhere Stabilität kommen außerdem noch Verstrebungen aus Balsa und Hartholz zum Einsatz. Die Motoren sind auf 26mm Carbon-Rohren mit selbstgefertigten Rohrschellen montiert, die Rohre sind doppelt gelagert und entweder direkt oder mit einem Zahnrad mit einem Servo verbunden.
Aktueller Stand:
Der Grundkörper ist fertig und auch schon kurz geflogen, jedoch wurden wegen eines dummen Firmware-Fehlers dabei die Landebeine komplett abgerissen, da muss jetzt was Stabileres her. Des Weiteren müssen die ausfahrbaren Tragflächen fertig gestellt und eingebaut werden, ebenso die Energieversorgung (bin bisher mit 6S LiPos geflogen), die muss man aber noch gründlich testen. Außerdem müssen die Tragflächen noch fertig laminiert werden. Hab aber leider gerade wenig Zeit
. So sieht's daweil aus:
Während dem Bau:
(mittlerweile sind auch schon die Flaps eingebaut)
Schwenkbare Rotoren
Und hier noch eine Fotomontage wie es beim Fliegen aussehen wird (der Grundkörper ist schon gefolgen, mit Tragflächen werde ich es dann mit dem neuen Landegestell auf der Wiese testen):
Technische Daten:
Motoren: Tiger Motors MN 4014 – 400KV – von T-Motors zur Verfügung gestellt
ESCs: Hobbywing Platinum Pro 30A
Props: 17x5,5” CFK-Props
Akku: 7S2P 2500mAh LiFePo4 – von SLS zur Verfügung gestellt
Verbrennungsmotor: RotoMotor ROTO 50 V2 – von RotoMotor Ltd. zur Verfügung gestellt
Generator: Kontronik PYRO 850-24P – von Kontronik zur Verfügung gestellt
Spannweite (Grundkörper): 4m
Spannweite (mit ausgefahrenen Tragflächen): 5,6m
Abfluggewicht: ca. 20kg
Firmware: modifizierte ArduCopter 2.9.1b Firmware
PS: für Ideen und Anregungen bin ich dankbar, das wird meine neue Versuchsplattform Nummer eins
Zuletzt bearbeitet:

