
Neuer G-RX8-Empfänger mit integriertem Vario
- Themenstarter FJH
- Beginndatum
- Status
- Nicht offen für weitere Antworten.

Was hat Frsky den hier drunter versteckt oder haben die "gekleckert" ?
Ist in der Realität gar nicht groß, der Empfänger verliert sich ja fast in meinem Motorsegler, in den er reinkommt.
Werde den AIN2 Eingang wohl gleich noch zur Antriebsakkuspannungsmessung nutzen, ist zumindest für den Überblick hilfreich.
Wenn jemanden das Papiergehäuse stört, bei diesem Tschechen kann man ein 3D-gedrucktes Gehäuse kaufen, er hat gleich noch 90° Antennenführungen ange"baut".
https://youtu.be/abHSphTYkRE
Gruß Bussard
p.s. Soll kein Kommerz-Beitrag sein, bin weder verwandt oder verschwägert oder sonstwie bekannt mit dem Video-Erstelle
https://youtu.be/abHSphTYkRE
Gruß Bussard
p.s. Soll kein Kommerz-Beitrag sein, bin weder verwandt oder verschwägert oder sonstwie bekannt mit dem Video-Erstelle
Zuletzt bearbeitet:
Heute war der erste Einsatz des G-RX8 in einem Modell (E-Segler, auf 8-Kanal PWM mit Telemetrie K1-8).
Die meisten Sachen waren unauffällig:
Pro:
Im Freien bei ca. 7°C lag das Modell über 15min in der Kälte.
Nach Einschalten, Telemetrie-Nullung, Reichweiten-Check und dann dem einen Testflug hatte ich nach weiteren ca. 15min nach der Landung eine Höhenanzeige von 22,5m.
(Leider hatte ich kein Log aufgezeichnet).
Das ist absolut unbefriedigend.
Darum habe zu Hause nach Akklimatisierung und 21°C Zimmertemperatur ein Nullpunktdrift-Log aufgezeichnet.
Hier hatte ich nach 12min eine Drift von 11,4m. Unbrauchbar!
Um auf immer noch schlechte 3m Abweichung zu kommen, muß ich über 5min warten.
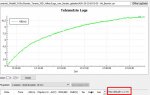
Der Grund liegt m.E. in der direkten thermischen Kopplung des Baro-Sensors mit dem Prozessor auf der anderen Platinenseite.
Auch scheint FrSky den mit im Baro-Sensor verbauten Temperatur-Sensor nicht oder nicht richtig zu nutzen. Der ist eigentlich genau dazu gedacht, um Umgebungstemperatureinflüsse herauszurechnen.
Genau das ist ja bei OTX schon fast hervorragend gelöst. Gut, es ist nicht der genau gleiche Sensor, aber so gravierend darf die Drift für mich nicht sein.
Wer will sein Modell schon 10 bis 15min eingeschaltet ins Gras legen, bevor man nullt und dann startet?
An eine Einzelexemplarstreuung mag ich nicht recht glauben, lasse mich aber gern durch andere Einlaufkurven eines Besseren belehren.
Notiz: Im Beiblatt werden die beiden Analogspannungseingänge (RxBat und AIN2) nicht erwähnt, die Meßbereiche sollten aber doch mindestens angegeben werden.
Gruß Bussard
Die meisten Sachen waren unauffällig:
Pro:
- Rangetest-Reichweite (S + E je ca. 1,2m hoch) ca. 60m, OK
- Stromaufnahme ~75mA, OK
- Sichtbarkeit der LEDs sehr gut, OK
- merkliche Eigenerwärmung, noch OK, aber mit Folgen
- auffällig starke Einlaufkurve des Varios
- für E-Segler brauche ich 7 Kanäle, bei Bus-Freischaltung gehen mir aber 2 der 8 Kanäle verloren, also dann nur für Hangsegler ohne Motor zu gebrauchen
Im Freien bei ca. 7°C lag das Modell über 15min in der Kälte.
Nach Einschalten, Telemetrie-Nullung, Reichweiten-Check und dann dem einen Testflug hatte ich nach weiteren ca. 15min nach der Landung eine Höhenanzeige von 22,5m.
(Leider hatte ich kein Log aufgezeichnet).
Das ist absolut unbefriedigend.
Darum habe zu Hause nach Akklimatisierung und 21°C Zimmertemperatur ein Nullpunktdrift-Log aufgezeichnet.
Hier hatte ich nach 12min eine Drift von 11,4m. Unbrauchbar!
Um auf immer noch schlechte 3m Abweichung zu kommen, muß ich über 5min warten.
Der Grund liegt m.E. in der direkten thermischen Kopplung des Baro-Sensors mit dem Prozessor auf der anderen Platinenseite.
Auch scheint FrSky den mit im Baro-Sensor verbauten Temperatur-Sensor nicht oder nicht richtig zu nutzen. Der ist eigentlich genau dazu gedacht, um Umgebungstemperatureinflüsse herauszurechnen.
Genau das ist ja bei OTX schon fast hervorragend gelöst. Gut, es ist nicht der genau gleiche Sensor, aber so gravierend darf die Drift für mich nicht sein.
Wer will sein Modell schon 10 bis 15min eingeschaltet ins Gras legen, bevor man nullt und dann startet?
An eine Einzelexemplarstreuung mag ich nicht recht glauben, lasse mich aber gern durch andere Einlaufkurven eines Besseren belehren.
Notiz: Im Beiblatt werden die beiden Analogspannungseingänge (RxBat und AIN2) nicht erwähnt, die Meßbereiche sollten aber doch mindestens angegeben werden.
Gruß Bussard
Hallo Bussard,
kann ich so bestätigen. Ich hatte auch mal Kontakt mit einem FrSky Mitarbeiter, dem ich das erklären wollte. Kam aber nur wenig bei raus - zumindest stimmt jetzt aber die Höhenanzeige, die lag anfangs auch gut daneben. Das Vario selbst ist gut brauchbar, die Temperaturkomepensation der Höhenanzeige weniger. Der Chip hätte vermutlich die Voraussetzungen. Ich hab dann aufgegeben und schalte jetzt das interne Vario ab (geht zum Glück) und schließe einen DIY Sensor an")
Welchen Sender hast du benutzt? Mit meiner X9D kam ich deutlich weiter im RT, fliegend mit den längeren Antennen sogar bis 700m(!).
kann ich so bestätigen. Ich hatte auch mal Kontakt mit einem FrSky Mitarbeiter, dem ich das erklären wollte. Kam aber nur wenig bei raus - zumindest stimmt jetzt aber die Höhenanzeige, die lag anfangs auch gut daneben. Das Vario selbst ist gut brauchbar, die Temperaturkomepensation der Höhenanzeige weniger. Der Chip hätte vermutlich die Voraussetzungen. Ich hab dann aufgegeben und schalte jetzt das interne Vario ab (geht zum Glück) und schließe einen DIY Sensor an
Welchen Sender hast du benutzt? Mit meiner X9D kam ich deutlich weiter im RT, fliegend mit den längeren Antennen sogar bis 700m(!).
....
* für E-Segler brauche ich 7 Kanäle, bei Bus-Freischaltung gehen mir aber 2 der 8 Kanäle verloren, also dann nur für Hangsegler ohne Motor zu gebrauchen
....
* für E-Segler brauche ich 7 Kanäle, bei Bus-Freischaltung gehen mir aber 2 der 8 Kanäle verloren, also dann nur für Hangsegler ohne Motor zu gebrauchen
....
mit aktueller FW hat man im PWM-Bindemodus 8 PWM-Kanäle und SBus In, kein SBus Out. Wozu brauchst du bei deinem Segler den SBus Bindemodus mit SBus Out?
...Ich hab dann aufgegeben und schalte jetzt das interne Vario ab (geht zum Glück) und schließe einen DIY Sensor an
Welchen Sender hast du benutzt? Mit meiner X9D kam ich deutlich weiter im RT, fliegend mit den längeren Antennen sogar bis 700m(!).
Welchen Sender hast du benutzt? Mit meiner X9D kam ich deutlich weiter im RT, fliegend mit den längeren Antennen sogar bis 700m(!).
Ob ich ein separates Vario ranhänge, gleich mit GPS?, will ich jetzt noch nicht entscheiden. Muß in den nächsten Wochen am gebraucht gekauften Segler noch einiges umbauen, dann werde ich mehr wissen.
... dann hätte ich ja gleich einen X8R aus der Kiste nehmen können, der nicht so ein Papp-Gehäuse hat ....
Hi Bussard,
mit aktueller FW hat man im PWM-Bindemodus 8 PWM-Kanäle und SBus In, kein SBus Out. Wozu brauchst du bei deinem Segler den SBus Bindemodus mit SBus Out?
mit aktueller FW hat man im PWM-Bindemodus 8 PWM-Kanäle und SBus In, kein SBus Out. Wozu brauchst du bei deinem Segler den SBus Bindemodus mit SBus Out?
Grüße, Bussard
Hier ist der G-RX8 seit gestern verbaut.
Welchen Sender hast du benutzt? Mit meiner X9D kam ich deutlich weiter im RT, fliegend mit den längeren Antennen sogar bis 700m(!).
Habe eine Ur-X9D, meist in ein Pult, im Winter mit "Muff" und Heizung eingebaut. Die Antenne habe ich innerhalb des HK-Muffs hinter klarer Folie, noch keine Reichweiteneinschränkung dadurch bemerkt.
... dann hätte ich ja gleich einen X8R aus der Kiste nehmen können, der nicht so ein Papp-Gehäuse hat ....
Für mich sind aber der schmale Aufbau und die beidseitigen Servoanschlüsse optimal. Jetzt, wo er auch noch verpolsicher ist, sicher einer der besten Empfänger die FrSky gerade zu bieten hat.
Sollte das zusammenfrickeln des oxs funktionieren, bin ich schon gespannt, wie sich dann die Höhenmesser (G-RX8/UniSens-E/oxs) verhalten.
Grüße,
Klaus
Der G-RX8 soll(te) ja eigentlich in einen kleinen 600g Hanggleiter, dort eben wegen des Platzproblems. Es interessiert mich schon, wie hoch ich an unserem Mini-Hang bei bestimmten Windbedingungen komme, indem ich mich von der Hangkante in den ersten, zweiten dann eventuell noch dritten oder sehr selten 4. Rotor "hocharbeite", geschätzt 200 bis 300m, aber das kann ich eben besser bei einem 3-4m Segler abschätzen. Wissen ist besser.
Nun kam der Segler mit viel Platz "dazwischen" als Testplattform. Mit E-Antrieb für Tests sicher besser als ein reiner Segler im Winter (obwohl, in dieser Woche habe ich schon einige Bussarde und eine Weihe beim Kreisen beobachtet).
Für oXs alles Gute.
Gruß Bussard
Nun kam der Segler mit viel Platz "dazwischen" als Testplattform. Mit E-Antrieb für Tests sicher besser als ein reiner Segler im Winter (obwohl, in dieser Woche habe ich schon einige Bussarde und eine Weihe beim Kreisen beobachtet).
Für oXs alles Gute.
Gruß Bussard
...Das Vario selbst ist gut brauchbar, die Temperaturkomepensation der Höhenanzeige weniger.
Ca. 11m Fehler in der Höhe stört mich nicht, also werde ich das Vario mal testen sobald das Wetter zu Flugwetter mutiert.
..... fliegend mit den längeren Antennen sogar bis 700m(!).
Bitte sag nochmal welche Antennen das sind und ob die etwas stabiler sind.
Danke
Walter
Müllt das Vario nicht mehr den Telemetriekanal zu? Ich erinnere mich, dass du das mal berichtet hast.
Ca. 11m Fehler in der Höhe stört mich nicht, also werde ich das Vario mal testen sobald das Wetter zu Flugwetter mutiert.
Ca. 11m Fehler in der Höhe stört mich nicht, also werde ich das Vario mal testen sobald das Wetter zu Flugwetter mutiert.
Das hab ich schon mehrmals gelesen aber den original Link noch nicht gesehen.
Bitte sag nochmal welche Antennen das sind und ob die etwas stabiler sind.
Danke
Walter
Bitte sag nochmal welche Antennen das sind und ob die etwas stabiler sind.
Danke
Walter
Stabiler sind sie nicht, dafür aber so dünn (0,9mm), dass man sie in Bowdenzuginnenrohren mit Außendurchmesser 2mm verlegen kann. Das ist mechanisch noch stabiler, man kann das Röhrchen im Modell fixieren und muss nur noch die Antennen einschieben - für mich die perfekte Lösung. Hier beim R-XSR:

Kommt bei dir nach dem R-XSR ein SBUS-Decoder/SBUS-Servos oder setzt du den als Redundanz ein?
Ich frage, weil das Bild eher nach einem EPO-Segler aussieht und da Redundanz eher ... hmm... ungewöhnlich ist..
Ich frage, weil das Bild eher nach einem EPO-Segler aussieht und da Redundanz eher ... hmm... ungewöhnlich ist..
Das ist ein FPV Wing. Ich will natürlich wissen, was die 700m im Rangetest in der Praxis für eine maximal Reichweite ergeben - alles natürlich im Rahmen der FDGO. SBus geht in den FC, von dort kommt der SPort für die Telemetrie. Für sowas ist der Kleine perfekt.
Zuletzt bearbeitet:
G-RX8 schon offiziell zu kaufen oder kann man sich da noch bewerben für Testflüge.
In den wenigen Tagen mit Sonnenschein in diesem Jahr habe ich bereits einige Hang und Thermikflüge erfliegen können mit der herkömmlichen Kombi x8R und extra vario.
x8R, extra vario und Einzel zellen Stromsensor ist bei mir die übliche Kombination.
In den wenigen Tagen mit Sonnenschein in diesem Jahr habe ich bereits einige Hang und Thermikflüge erfliegen können mit der herkömmlichen Kombi x8R und extra vario.
x8R, extra vario und Einzel zellen Stromsensor ist bei mir die übliche Kombination.
Gelten die genannten 700 m Reichweite im Testmodus auch für den R-XSR? Wenn ja, im Originalzustand oder mit den anderen Antennen?
Zuletzt bearbeitet:
- Status
- Nicht offen für weitere Antworten.

