
Aktuell in der Entwicklung: Micro FPV racing frame "Scout" (150mm)
- Themenstarter Felias
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Bisher bin ich nur PID1 geflogen. Wollte aber auch Luxfloat mal austesten... theoretisch finde ich den Controller am Besten.
Hatte den kleinen Kopter in der Hand und hab gearmt, derschaukelte sich dann aus den Fingern raus. Tut selbst bei 3" weh, gibt aber keine so tiefen Wunden ;_)
Ich will auch mal langsam ins Acro fliegen einsteigen, und hatte mich vorher mal theoretisch mit den verschiedenen Flugmodi beschäftigt, hauptsächlich mit Taulabs, aber auch Vergleiche mit Cleanflight, Openpilot und MultiWii gemacht.
Dort hatte ich was dazu geschrieben: http://forum.taulabs.org/viewtopic.php?f=12&t=704
Prinzipiell gibt es zwischen PID1 (rewrite) und PID2 (luxfloat) von der Regelung einen kleinen aber prinzipiellen Unterschied, wenn ich mich recht erinnere.
Sind ja an sich beides PID Regler, aber bei PID2 werden bei dem D-Term Stick Inputs nicht berücksichtigt. Der wirkt also nur auf Störungen etc.
Dadurch sollte PID1 prinzipiell knackiger auf schnelle Änderungen reagieren, PID2 dagegen etwas "smoother". Kommt dann natürlich auf die sonstigen PID Einstellungen an.
Dort hatte ich was dazu geschrieben: http://forum.taulabs.org/viewtopic.php?f=12&t=704
Prinzipiell gibt es zwischen PID1 (rewrite) und PID2 (luxfloat) von der Regelung einen kleinen aber prinzipiellen Unterschied, wenn ich mich recht erinnere.
Sind ja an sich beides PID Regler, aber bei PID2 werden bei dem D-Term Stick Inputs nicht berücksichtigt. Der wirkt also nur auf Störungen etc.
Dadurch sollte PID1 prinzipiell knackiger auf schnelle Änderungen reagieren, PID2 dagegen etwas "smoother". Kommt dann natürlich auf die sonstigen PID Einstellungen an.
Hallo zusammen
Hab nun nach einem kleinen Mahleur mit dem Sandwichframe den Carbonrahmen erhalten und den Scout zusammen gestellt.
Hab die Flip aus Nic's Bundle entfernt und die noch daliegende wegen MW32 wegen Baro und Mag genommen. Es tut eigentlich alles wie es soll und der Maiden war bis auf die noch anstehenden PID korrekturen erfolgreich. Nach der Landung habe ich beim Check festgestellt, dass die Motoren gemessen bis 75 Grad warm waren. Wie ist das den bei Euch?
Gruss,Terry
Hab nun nach einem kleinen Mahleur mit dem Sandwichframe den Carbonrahmen erhalten und den Scout zusammen gestellt.
Hab die Flip aus Nic's Bundle entfernt und die noch daliegende wegen MW32 wegen Baro und Mag genommen. Es tut eigentlich alles wie es soll und der Maiden war bis auf die noch anstehenden PID korrekturen erfolgreich. Nach der Landung habe ich beim Check festgestellt, dass die Motoren gemessen bis 75 Grad warm waren. Wie ist das den bei Euch?
Gruss,Terry
danke für den Hinweis, ja er "schüttelt" sich noch. Hab jedoch für den Test den Controller fluxfloat aktiviert, da sind die Standart PID's eh schon tiefer. OneShot hatte ich nicht aktiviert, muss bei nicht gebrauch ja nicht zwingend aktiviert sein oder? Komme leider erst Samstag wieder zum testen und werde wieder berichten.
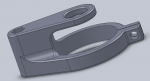
Da mir das Propeller Kürzen mit der Schere und Zirkel zu aufwändig erscheint habe ich mir eine kleine Vorrichtung gezeichnet und ausgedruckt.
Mit einem Dremel + Adapter auf 43mm oder einem anderen Werkzeug mit 43mm Aufnahme kann man dann die Propeller sauber auf die gleiche Länge fräsen.
Man benötigt noch 2 M5 Schrauben und Muttern.
Eine Schraube wird als Lagerung für den Propeller benötigt und eine Schraube für die Klemmung.
Ich habe mir das Tool schon ausgedruckt und auch getestet. Mit dem Ergebnis bin ich ganz zufrieden.
Eventuell funktioniert dieser Adapter für den Dremel: http://www.thingiverse.com/thing:76773
Ich habe den Adapter aber nicht probiert, daher mit Vorsicht zu genießen.
Gruß, Heiko
Mit einem Dremel + Adapter auf 43mm oder einem anderen Werkzeug mit 43mm Aufnahme kann man dann die Propeller sauber auf die gleiche Länge fräsen.
Man benötigt noch 2 M5 Schrauben und Muttern.
Eine Schraube wird als Lagerung für den Propeller benötigt und eine Schraube für die Klemmung.
Ich habe mir das Tool schon ausgedruckt und auch getestet. Mit dem Ergebnis bin ich ganz zufrieden.
Eventuell funktioniert dieser Adapter für den Dremel: http://www.thingiverse.com/thing:76773
Ich habe den Adapter aber nicht probiert, daher mit Vorsicht zu genießen.
Gruß, Heiko
Anhänge
-
 170 KB Aufrufe: 43
170 KB Aufrufe: 43 -
562 KB Aufrufe: 5

Hallo, sowas in verstellbar lässt sich mit einem fräszirkel für Oberfräsen recht einfach realisieren. Der universal Zirkel von Strassacker sollte da gut geeignet sein, ist sehr steif, habe ihn selber.
http://www.lautsprechershop.de/hifi/fraeszirkel.htm
Mfg Matze
http://www.lautsprechershop.de/hifi/fraeszirkel.htm
Mfg Matze

")
- Status
- Nicht offen für weitere Antworten.

